输入 和 输出
关键 矩阵变换 输入 和 输出
(drv0n 至
DRV6N 和 SEN0N 至 sen6n)
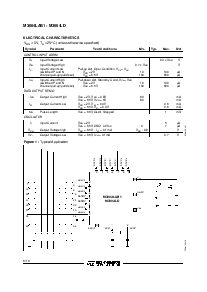
这 传输者 键盘 是 arranged 作 一个 scanned
矩阵变换. 这 矩阵变换 组成 的 7 驱动器 输出 和
7 sense 输入 作 显示 在 图示 1. 这 驱动器
输出 DRV0N 至 DRV6N 是 打开 流 n-chan-
nel tran-sistors 和 它们 是 传导性的 在 这
保卫-用 模式. 这 7 sense 输入 (sen0n 至
sen6n) 使能 这 一代 的 56 command
代号. 和 2 外部 二极管 所有 64 commands 是
addressable. 这 sense 输入 有 p-频道
拉-向上 晶体管 所以 那 它们 是 高 直到 它们
是 牵引的 低 用 连接 它们 至 一个 输出
通过 一个 关键depression 至 initiate 一个 代号 传递.
地址 模式 输入
(adrm)
这 sub-系统 地址 和 the 传递
模式 是 定义 用 连接 这 ADRM 输入
至 一个 或者 更多 驱动器 输出 (drv0n 至 drv6n)
的 这 关键 矩阵变换. 如果 更多 比 一个 驱动器 是 con-
nected 至 adrm, 它们 必须 是 decoupled 用 di-
odes. 这个 准许 这 定义 的 七
sub-系统地址作 显示 在 表格 3. 如果 驱动器
DRV6N 是 连接 至 adrm, 这 数据 输出
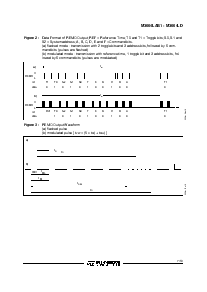
format 的 REMO 是 modulated 或者 如果 not 连接,
flashed.
这 ADRM 输入 有 切换 拉-向上 和 拉-
向下 负载. 在 这 保卫-用 模式 仅有的 这 拉-
向下 设备 是 起作用的. Whether ADRM 是 打开
(sub-系统 地址 0, flashed 模式) 或者 con-
nected 至 这 驱动器 输出, 这个 输入 是 低 和
将 不 导致 unwanted 消耗. 当 这
传输者 是comes 起作用的 用 pressing 一个 关键, 这
拉-向下 设备 是 切换 止 和 这 拉-向上
设备 是 切换 在, 所以 那 这 应用 驱动器
信号 是 sensed 为 这 解码 的 这 sub-sys-
tem 地址 和 这 模式 的 传递.
这 arrangement 的 这 sub-系统 地址 cod-
ing 是 此类 那 在ly 这 驱动器 DRVnM 和 这
最高的 号码 (n) 定义 这 sub-系统 ad-
dress, e.g. 如果 驱动器 DRV2N 和 DRV4N 是 con-
nected 至 adrm, 在ly DRV4N 将 定义 这
sub-系统 地址. 这个 选项 能 是 使用 在
系统 需要 更多 比 一个 sub-系统 ad-
dress. 这 传输者 将 是 hard-连线的 为 sub-
系统 地址 2 用 连接DRV1N 至 adrm.
如果 now DRV3N 是 增加 至 ADRM 用 一个 关键 或者 一个
转变, 这 transmitted sub-系统 一个ddress
改变 至 4. 一个 改变 的 这 sub-系统 地址
将 不 开始 一个 传递.
ADRM
DD
V
V
SS
振荡器
键盘
SCAN
脉冲波
距离
MODULATOR
控制
逻辑
REMO
输出
OSCI OSCO
DRV 输出
S
E
N
I
N
P
U
T
S
0N 1N 3N 4N 5N 6N2N
0N
1N
2N
3N
4N
5N
6N
3004l-02.eps
块 图解
M3004LAB1 - M3004LD
2/10