peb 22320
一般 信息
表格 的 内容 页
半导体 组 3
1 特性
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5
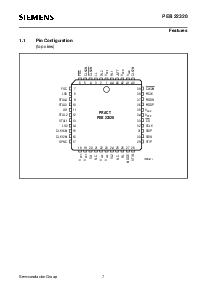
1.1 管脚 配置 (顶 视图) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .7
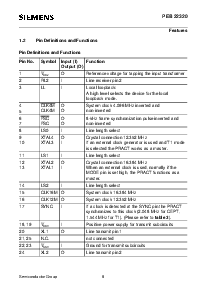
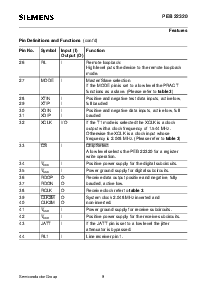
1.2 管脚 定义 和 功能 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .8
1.3 系统 integration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .10
2 函数的 描述
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .11
2.1 接受者 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .12
2.1.1 基本 符合实际 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .12
2.1.2 时钟 和 数据 恢复 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .13
2.1.3 输入 jitter 容忍 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .14
2.1.4 jitter attenuator 和 时钟 发生器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .15
2.2 传输者 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .20
2.2.1 基本 符合实际 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .20
2.2.2 输出 jitter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .22
2.3 local loopback . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .22
2.4 偏远的 loopback . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .22
2.5 绕过 jitter attenuator . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .22
2.6 微处理器 接口 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .22
2.7 接受者 丧失 的 信号 indication . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .22
2.8 主控/从动装置 选择 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .23
3 运算的 描述
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .24
3.1 重置. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .24
3.1.1 重置 和 cs 管脚 fixed 至
V
SS
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .24
3.1.2 重置 使用 cs 管脚 至 获得 程序编制 (一个 控制 是 使用) . . . . . . . . .26
3.2 运作 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .27
4 电的 规格
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .28
4.1 绝对 最大 比率 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .28
4.2 延迟 时间 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .28
4.2.1 延迟 从 xdip/xdin 至 xl1/xl2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .28
4.2.2 延迟 从 rl1/rl2 至 rdop/rdon . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .28
4.3 直流 特性 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .29
4.4 特性 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .30
4.5 推荐 振荡器 电路. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .31
4.6 交流 特性 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .34
4.6.1 双 栏杆 接口 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .34
4.6.2 系统 时钟 接口 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .36
4.6.3 微处理器 接口 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .38
4.6.4 xtal 定时 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .39