march 1994 6
飞利浦 半导体 产品 规格
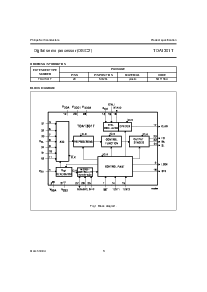
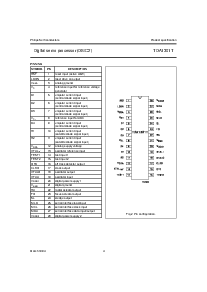
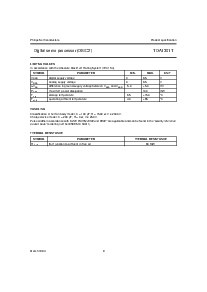
数字的 伺服 处理器 (dsic2) TDA1301T
在 这 事件 的 单独的 foucault focusing 方法, 这 dsic2
信号 conditioning 能 是 切换 下面 软件 控制
所以 那 这 信号 处理 遵从 至 那 给 在
等式 (4).
(4)
这 fe
n
因此 得到 是 更远 processed 用 一个
均衡的 integral 和 差别的 过滤 部分 (pid).
一个 focus ok 标记 (fok) 是 发生 用 意思 的 这
central aperture 信号 和 一个 可调整的 涉及 水平的.
这个 信号 是 使用 至 提供 extra 保护 为 这
追踪-丧失 (tl) 一代, 这 focus 开始-向上 程序
和 这 漏出-输出 发现. 这 放射状的 或者 追踪 错误
信号 是 发生 用 这 satellite 探测器 信号 r1 和
r2. 这 放射状的 错误 信号 (re) 能 是 formulated 作 每
等式 (5).
(5)
在哪里 这 index ‘s’ indicates 这 自动 范围调整
运作 这个 是 执行 在 这 放射状的 错误 信号.
这个 范围调整 是 需要 至 避免 非-最佳的 动态
范围 用法 在 这 数字的 描述 和, 也, 至
减少 放射状的 带宽 展开. 这 放射状的 错误 信号 将
也 是 released 从 补偿 在 disc 开始-向上. 这 四
信号 从 这 central aperture detectors, 一起 和
这 satellite 探测器 信号, 发生 一个 追踪 位置
信号 (tpi) 这个 能 是 formulated 作 每 等式 (6).
(6)
在哪里 这 weighting 因素 总_增益 是 发生
内部 在 这 dsic2 在 initialization.
focus 控制
这 下列的 focus 伺服 功能 是 组成公司的 在 这
dsic2 数字的 控制.
F
OCUS 开始
-
向上
five initially 承载 coefficients 影响 这 开始-向上
behaviour 的 这 focus 控制. 这 automatically
发生 triangular 电压 能 是 影响 用
3 参数, 为 这 height (ramp_heigth) 和 直流-补偿
(ramp_补偿) 的 这 triangle 和 它的 steepness (ramp_inc).
至 保护 相反 false focus 要点 detections 二
参数 是 有. 一个 是 一个 绝对 水平的 在 这
ca 信号 (ca_开始) 和 这 其它 是 一个 绝对 水平的 在
这 fe
n
信号 (fe_开始). 当 这 ca_开始 水平的 是
FE
n
2
D1 D2
–
D1 D2
+
----------------------
×
=
RE
s
R1 R2
–
( )
re_增益
×
R1 R2
+
( )
re_补偿
×
+
=
TPI D1 D2 D3 D4
+ + +
( )
R1 R2
+
( )
总_增益
×
–
[
]
sin
=
reached, 这 fok 信号 变为 真实. 如果 这 fok 信号
是 真实 当 这 水平的 在 这 fe
n
信号 是 reached 这
focus pid 是 使能 和 switches 在 当 这 next 零
越过 是 发现 在 这 fe
n
信号.
F
OCUS 位置 控制 循环
这 focus 控制 循环 包含 一个 数字的 pid 控制
这个 有 5 参数 有 至 这 用户. 这些
coefficients 影响 这 integrating (foc_int), 均衡的
(foc_prop) 和 differentiating (foc_柱子_含铅的) action 的 这个
pid 和 这 数字的 低-通过 过滤 (foc_柱子_噪音) 这个
跟随 这 pid. 这 fifth 系数 (foc_增益) influences
这 循环 增益.
D
ROP
-
输出 发现
这个 探测器 能 是 影响 用 一个 参数
(ca_漏出). 这 fok 信号 将 变为 false 和 这
积分器 的 这 pid 将 支撑 如果 这 ca 信号 drops 在下
这 编写程序 绝对 ca 水平的. 当 这 fok 信号
变为 false 它 是 assumed, initially, 至 是 造成 用 一个
黑色 点.
F
OCUS 丧失 发现 和 快 重新开始
whenever fok 是 false 为 变长 比 大概
3 ms, 它 是 assumed 那 这 focus 要点 是 lost. 一个 快
重新开始 程序 是 initiated 这个 是 有能力 的 重新开始
这 focus 循环 在里面 200 至 300 ms 取决于 在 这
编写程序 coefficients 设置 用 这 微控制器.
F
OCUS 循环 增益 切换
这 增益 的 这 focus 控制 循环 (foc_增益) 能 是
multiplied 用 一个 因素 的 2 或者 分隔 用 一个 因素 的 2 在
正常的 运作. 这 积分器 值 的 这 pid 是
corrected accordingly. 这 differentiating (foc_柱子_含铅的)
action 的 这 pid 能 是 切换 在 这 一样 时间 作 这
增益 切换 是 执行.
放射状的 控制
这 下列的 放射状的 伺服 功能 是 组成公司的 在
这 dsic2 数字的 控制.
L
EVEL INITIALIZATION
在 开始-向上 一个 自动 调整 程序 是
使活动 至 设置 这 值 的 这 放射状的 错误 增益
(re_增益), 补偿 (re_补偿) 和 satellite 总 信号 增益
(总_增益) 为 tpi 水平的 一代. 这 initialization
程序 runs 在 一个 放射状的 打开-循环 situation 和 是
≤
300 ms. 这个 开始-向上 时间 时期 将 coincide 和 这
last 部分 的 这 转变 表格 发动机 开始-向上 时间 时期.