在 电源-向下 模式, 这 max525 输出 放大器
和 这 涉及 输入 enter 一个 高-阻抗 状态.
这 串行 接口 仍然是 起作用的. 数据 在 这 输入
寄存器 是 retained 在 电源-向下, 准许 这
max525 至 recall 这 输出 states 较早的 至 进去
关闭. 开始 向上 从 电源-向下 也 用 recalling
这 previous 配置 或者 用 updating 这 dacs
和 新 数据. 当 powering 向上 这 设备 或者 bring-
ing 它 输出 的 关闭, 准许 15µs 为 这 输出 至 sta-
bilize.
串行-接口 配置
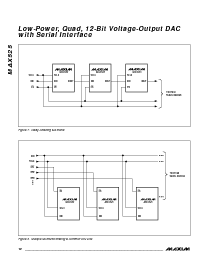
这 max525’s 3-线 串行 接口 是 兼容
和 两个都 microwire™ (图示 2) 和 spi™/qspi™
(图示 3). 这 串行 输入 文字 组成 的 二 地址
位 和 二 控制 位 followed 用 12 数据 位
(msb 第一), 作 显示 在 图示 4. 这 4-位 地址/
控制 代号 确定 这 max525’s 回馈 输出-
lined 在 表格 1. 这 连接 在 dout 和
这 串行-接口 端口 是 不 需要, 但是 将 是
使用 为 数据 echo. 数据 使保持 在 这 max525’s 变换
寄存器 能 是 shifted 输出 的 dout 和 returned 至 这
微处理器 (µp) 为 数据 verification.
这 max525’s 数字的 输入 是 翻倍 缓冲.
取决于 在 这 command issued 通过 这 串行
接口, 这 输入 寄存器(s) 能 是 承载 没有
影响 这 dac 寄存器(s), 这 dac 寄存器(s) 能
是 承载 直接地, 或者 所有 四 dac 寄存器 能 是
updated 同时发生地 从 这 输入 寄存器
(表格 1).
串行-接口 描述
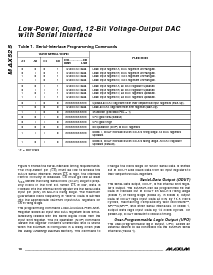
这 max525 需要 16 位 的 串行 数据. 表格 1 lists
这 串行-接口 程序编制 commands. 为 cer-
tain commands, 这 12 数据 位 是 “don’t cares.” 数据
是 sent msb 第一 和 能 是 sent 在 二 8-位 packets 或者
一个 16-位 文字 (
CS
必须 仍然是 低 直到 16 位 是
transferred). 这 串行 数据 是 composed 的 二 dac
地址 位 (a1, a0) 和 二 控制 位 (c1, c0),
followed 用 这 12 数据 位 d11…d0 (图示 4). 这
4-位 地址/控制 代号 确定:
•
这 寄存器(s) 至 是 updated
•
这 时钟 边缘 在 这个 数据 是 至 是 clocked 输出
通过 这 串行-数据 输出 (dout)
•
这 状态 的 这 用户-可编程序的 逻辑 输出
(upo)
•
如果 这 部分 是 至 go 在 关闭 模式 (假设
PDL
是 高)
•
如何 这 部分 是 配置 当 coming 输出 的 shut-
向下 模式.
MAX525
低-电源, 四方形, 12-位 电压-输出 dac
和 串行 接口
_______________________________________________________________________________________ 9
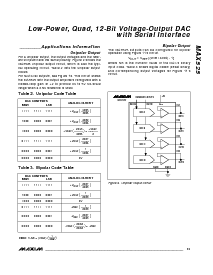
SCLK
DIN
DOUT*
CS
SK
所以
SI*
i/o
MAX525
MICROWIRE
端口
*the dout-si 连接 是 不 必需的 为 writing 至 这 max525,
但是 将 是 使用 为 readback 目的.
图示 2. 连接 为 microwire
DOUT*
DIN
SCLK
CS
MISO*
MOSI
SCK
i/o
spi/qspi
端口
SS
+5V
cpol = 0, cpha = 0
*the dout-miso 连接 是 不 必需的 为 writing 至 这 max525,
但是 将 是 使用 为 readback 目的.
MAX525
图示 3. 连接 为 spi/qspi
图示 4. 串行-数据 format
MSB ..................................................................................lsb
16 位 的 串行 数据
地址
位
控制
位
数据 位
MSB.............................................lsb
a1 a0 c1 c0 D11................................................D0
12 数据 位
4 地址/
控制 位