14/29
¡ 半导体
msm80c85ahrs/gs/js
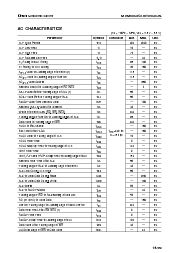
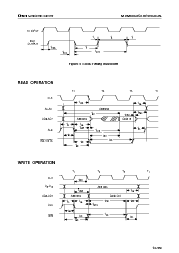
交流 特性
参数 标识 情况 最小值 最大值 单位
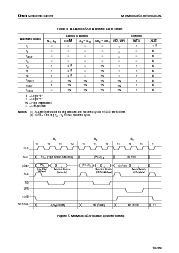
cly 循环 时期 t
CYC
t
CYC
=200 ns
cl=150 pf
200 2000 ns
cly 低 时间 t
1
40 — ns
cly 高 时间 t
2
70 — ns
cly 上升 和 下降 时间 t
r
, t
f
—30ns
X
1
rising 至 clk rising t
XKR
25 120 ns
x1 rising 至 ckk 下落 t
XKF
30 150 ns
一个
8
~
15
有效的 至 leading 边缘 的 控制 (1) t
交流
115 — ns
AD
0
~
7
有效的 至 leading 边缘 的 控制 t
ACL
115 — ns
AD
0
~
15
有效的 数据 在 t
AD
— 350 ns
地址 float 之后 leading 边缘 的
RD
INTA
t
AFR
—0ns
一个
8
~
15
有效的 在之前 trailing 边缘 的 ale (1) t
AL
50 — ns
AD
0
~
7
有效的 在之前 trailing 边缘 的 ale t
所有
50 — ns
准备好 有效的 从 地址 有效的 t
ARY
— 100 ns
地址 (一个
8
~
15
) 有效的 之后 控制 t
CA
60 — ns
宽度 的 控制 law (
RD
,
WR
,
INTA
)t
CC
230 — ns
trailing 边缘 的 控制 至 leading edges 的 ale t
CL
25 — ns
数据 有效的 至 trailing 边缘 的
WR
t
DW
230 — ns
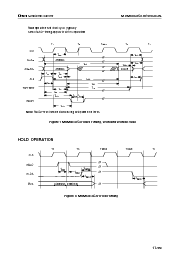
hlda 至 总线 使能 t
HABE
— 150 ns
总线 float 之后 hlda t
HABF
— 150 ns
hlda 有效的 至 trailing 边缘 的 clk t
HACK
40 — ns
支撑 支撑 时间 t
HDH
0—ns
支撑 步伐 向上 时间 至 trailing 边缘 的 clk t
HDS
120 — ns
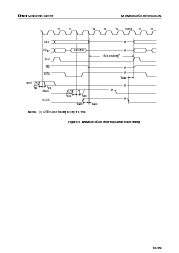
intr 支撑 时间 t
INH
0—ns
intr, rst 和 trap 建制 时间 至 下落 边缘 的 clk t
INS
150 — ns
地址 支撑 时间 之后 ale t
LA
50 — ns
trailing 边缘 的 ale 至 leading 边缘 的 控制 t
LC
60 — ns
ale 低 在 clk 高 t
LCK
50 — ns
ale 至 有效的 数据 在 读 t
LDR
— 270 ns
ale 至 有效的 数据 在 写 t
LDW
— 140 ns
ale 宽度 t
LL
80 — ns
ale 至 准备好 稳固的 t
LRY
—30ns
trailing 边缘 的
RD
至 re-enabling 的 地址 t
RAE
90 — ns
rd (或者 inta) 至 有效的 数据 t
RD
— 150 ns
控制 trailing 边缘 至 leading 边缘 的 next 控制 t
RV
220 — ns
数据 支撑 时间 之后
RD
INTA
(7) t
RDH
0—ns
准备好 支撑 时间 t
RYH
0—ns
准备好 建制 时间 至 leading 边缘 的 clk t
RYS
100 — ns
数据 有效的 之后 trailing 边缘 的
WR
t
WD
60 — ns
leading 边缘 的
WR
至 数据 vaild t
WDL
—20ns
(ta = –40°c ~ 85°c, v
CC
= 4.5 v ~ 5.5 v)