X5001
6
spi 接口
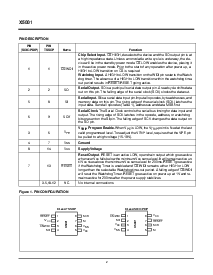
这 设备 是 设计 至 接口 直接地 和 这 syn-
chronous 串行 附带的 接口 (spi) 的 许多 popu-
lar 微控制器 families.
这 设备 monitors 这 cs/wdi 线条 和 asserts 重置
输出 如果 那里 是 非 activity 在里面 用户 selctable 时间-输出
时期. 这 设备 也 monitors 这 vcc 供应 和
asserts 这 重置 如果 vcc falls 在下 一个 preset 最小
(v
TRIP
). 这 设备 包含 一个 8-位 看门狗 计时器
寄存器 至 控制 这 看门狗 时间-输出 时期. 这 cur-
rent settings 是 accessed 通过 这 si 和 所以 管脚.
所有 说明 (表格 1) 和 数据 是 transferred msb
first. 数据 输入 在 这 si 线条 是 latched 在 这 first rising
边缘 的 sck 之后 cs 变得 低. 数据 是 输出 在 这
所以 线条 用 这 下落 边缘 的 sck. sck 是 静态的, 准许
这 用户 至 停止 这 时钟 和 然后 开始 它 又一次 至 重新开始
行动 在哪里 left 止.
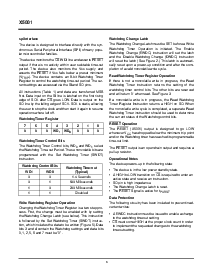
看门狗 计时器寄存器
看门狗 计时器 控制 位
这 看门狗 计时器 控制 位, wd
0
和 wd
1
, 选择
这 看门狗 时间-输出 时期. 这些 nonvolatile 位 是
编写程序 和 这 设置 看门狗 计时器 (swdt)
操作指南.
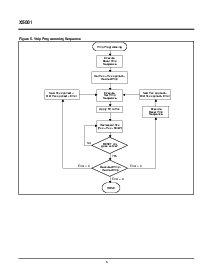
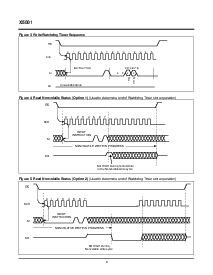
写 看门狗 寄存器 运作
changing 这 看门狗 计时器 寄存器 是 一个 二 步伐 pro-
cess. 第一, 这 改变 必须 是 使能 和 用 设置
这 看门狗 改变 获得 (看 在下). 这个 操作指南
是 followed 用 这 设置 看门狗 计时器 (swdt) instruc-
tion, 这个 包含 这 数据 至 是 写 (图示 5). 数据
位 3 和 4 包含 这 看门狗 settings 和 数据 位
0, 1, 2, 5, 6 和 7 必须 是 “0” .
看门狗 改变 获得
这 看门狗 改变 获得 必须 是 设置 在之前 一个 写
看门狗 计时器 运作 是 initiated. 这 使能
看门狗 改变 (ewdc) 操作指南 将 设置 这 获得
和 这 使不能运转 看门狗 改变 (dwdc) 操作指南
将 重置 这 获得 (看 图示 2.) 这个 获得 是 自动地-
cally 重置 在之上 一个 电源-向上 情况 和 之后 这 com-
pletion 的 一个 有效的 nonvolatile 写 循环.
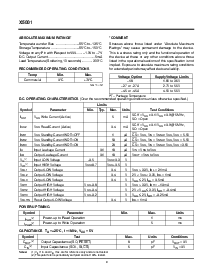
读 看门狗 计时器 寄存器 运作
如果 那里 是 不 一个 nonvolatile 写 在 progress, 这 读
看门狗 计时器 操作指南 returns 这 设置 的 这
看门狗 计时器 控制 位. 这 其它 位 是 保留
和 将 返回 ’0’ 当 读. 看 图示 3.
如果 一个 nonvolatile 写 是 在 progress, 这 读 看门狗
计时器 寄存器 操作指南 returns 一个 高 在 所以. 当
这 nonvolatile 写 循环 是 完成, 一个 seperate 读
看门狗 计时器 操作指南 应当 是 使用 至 决定
这 电流 状态 的 这 看门狗 控制 位.
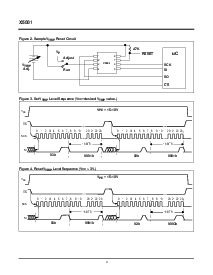
重置运作
这 重置 (x5001) 输出 是 设计 至 go 低
whenever v
CC
有 dropped 在下 这 最小 trip 要点
和/或者 这 看门狗 计时器 有 reached 它的 可编程序的
时间-输出 限制.
这 重置 输出 是 一个 打开 流 输出 和 需要 一个
拉 向上 电阻.
运算的 注释
这 设备 powers-向上 在 这 下列的 状态:
• 这 设备 是 在 这 低 电源 备用物品 状态.
• 一个 高 至 低 转变 在 cs 是 必需的 至 enter 一个
起作用的 状态 和 receive 一个 操作指南.
• 所以 管脚 是 高 阻抗.
• 这 看门狗 改变 获得 是 重置.
• 这 重置 信号 是 起作用的 为 t
PURST
.
数据 保护
这 下列的 电路系统 有 被 包含 至 阻止 inad-
vertent 写:
• 一个 ewdc 操作指南 必须 是 issued 至 使能 一个 改变
至 这 看门狗 timeout 设置.
•CS必须 来到 高 在 这 恰当的 时钟 计数 在 顺序
至 执行 这 要求 改变 至 这 看门狗
timeout 设置.
7 6543210
000
WD
1
WD
0
000
看门狗 控制 位
看门狗 时间-输出
(典型)wd1 WD0
0 0 1.4 秒
0 1 600 milliseconds
1 0 200 milliseconds
1 1 无能