Theory 的 运作
(持续)
表格 1. 系统 规格 Summary
(持续)
反馈 设备 Incremental Encoder (quadrature 信号; 支持 为 index 脉冲波)
控制 Algorithm 均衡的 Integral Derivative (pid) (加 可编程序的 integration 限制)
样本 间隔 Derivative 期: 可编程序的 从 2048/f
CLK
至 (2048
*
256)/f
CLK
在 步伐 的 2048/f
CLK
(256
至 65,536 µs 为 一个 8.0 MHz 时钟).
均衡的 和 integral: 2048/f
CLK
VELOCITY PROFILE (trajectory) 一代
这 trapezoidal velocity profile 发生器 computes 这 de-
sired 位置 的 这 发动机 相比 时间. 在 这 位置 模式
的 运作, 这 host 处理器 specifies acceleration, maxi-
mum velocity, 和 最终 位置. 这 LM628 使用 这个 infor-
mation 至 影响 这 move 用 accelerating 作 指定 直到
这 最大 velocity 是 reached 或者 直到 deceleration 必须
begin 至 停止 在 这 指定 最终 位置. 这 deceleration
比率 是 equal 至 这 acceleration 比率. 在 任何 时间 在 这
move 这 最大 velocity 和/或者 这 目标 位置 将
是 changed, 和 这 发动机 将 accelerate 或者 decelerate 交流-
cordingly.
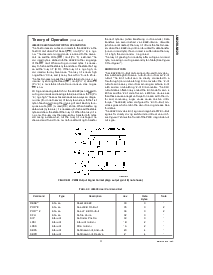
图示 10
illustrates 二 典型 trapezoidal veloc-
ity profiles.
图示 10
(一个) 显示 一个 简单的 trapezoid, 当
图-
ure 10
(b) 是 一个 例子 的 what 这 trajectory looks 像
当 velocity 和 位置 是 changed 在 不同的 时间
在 这 move.
当 运行 在 这 velocity 模式, 这 发动机 accelerates
至 这 指定 velocity 在 这 指定 acceleration 比率 和
维持 这 指定 velocity 直到 commanded 至 停止.
这 velocity 是 maintained 用 advancing 这 desired 位置
在 一个 常量 比率. 如果 那里 是 干扰 至 这 运动
在 velocity 模式 运作, 这 长-时间 平均 veloc-
ity 仍然是 常量. 如果 这 发动机 是 unable 至 维持 这
指定 velocity (这个 可以 是 造成 用 一个 锁 rotor,
为 例子), 这 desired 位置 将 continue 至 是 在-
creased, 结果 在 一个 非常 大 位置 错误. 如果 这个 condi-
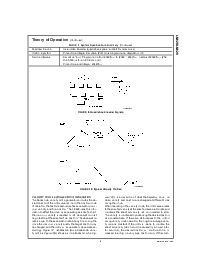
ds009219-11
图示 9. Quadrature Encoder 信号
ds009219-12
图示 10. 典型 Velocity Profiles
lm628/lm629
www.国家的.com9