AD816
rev. b
–7–
典型 驱动器 characteristics–
频率 – hz
100k
输入 水平的 – dbv
输出 水平的 – dbv
300M1M 10M 100M
–12
–15
–18
–21
–24
–27
3
0
–3
–6
–9
–12
–15
–18
6
–21
–9
–6
–3
0
V
在
= 0.5vrms
V
在
= 0.25vrms
V
在
= 125mvrms
V
在
= 62.5mvrms
g = +2
R
F
= 499
R
L
= 100
R
S
= 100
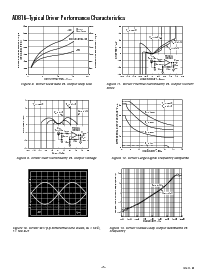
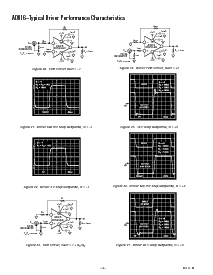
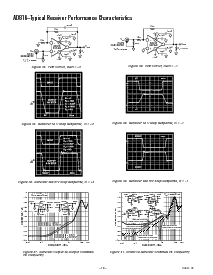
图示 17. 驱动器 小 和 大 信号 频率
回馈, g = +2
频率 – hz
100k 300M1M
normalized flatness – db
10M 100M
0.1
0
–0.1
–0.2
–0.3
–0.4
V
在
= 50mvrms
g +5
R
L
= 100
R
S
= 100
0
–1
–2
–3
–4
–5
–6
–7
1
2
–8
normalized 频率 回馈 – db
R
F
= 499
R
F
= 604
R
F
= 750
R
F
= 604
R
F
= 750
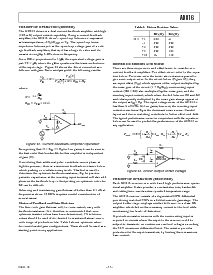
图示 18. 驱动器 频率 回馈 和 flatness,
g = +5
频率 – hz
100k 300M1M 10M 100M
V
在
= 200mvrms
g +2
R
L
= 100
R
S
= 100
0
–1
–2
–3
–4
–5
–6
–7
1
2
3
R
F
= 499
R
F
= 750
R
F
= 604
normalized 频率 回馈 – db
图示 19. 驱动器 频率 回馈 vs. r
F
, g = +2
0.04
0.03
0.02
0.01
0.00
–0.01
–0.02
–0.03
–0.04
diff 增益 – %
0.12
0.10
0.08
0.06
0.04
0.02
0.00
–0.02
–0.04
diff 阶段 – degrees
g = +2
R
F
= 1k
NTSC
12 345 678 91011
0.5
0.4
0.3
0.2
0.1
0.0
–0.1
–0.2
–0.3
增益
阶段
0.005
0.000
–0.005
–0.010
–0.015
–0.020
–0.025
–0.030
0.010
diff 增益 – %
diff 阶段 – degrees
123 45 678 91011
6 后面的 terminated 负载 (25
)
2 后面的 terminated 负载 (75
)
g = +2
R
F
= 1k
NTSC
增益
阶段
图示 14. 驱动器 差别的 增益 和 差别的
阶段 (每 放大器)
频率 – hz
10k 100k 1M 10M 100M
300M
0
–10
–20
–30
–40
–50
–60
–70
–80
–90
串扰 – db
驱动器 b = 输入
驱动器 一个 = 输出
–100
驱动器 一个 = 输入
驱动器 b = 输出
V
在
= 200mvrms
499
100
100
50
输出
输入
499
驱动器
一个
499
100
100
50
输出
输入
499
驱动器
B
图示 15. 驱动器 输出-至-输出 串扰 vs.
频率
频率 – hz
100k 1M 10M 100M
300M
3
0
–3
–6
–9
–12
–15
–18
–21
–24
输出/输入 水平的 – dbv
–27
V
在
= 1.0vrms
V
在
= 0.5vrms
V
在
= 0.25vrms
V
在
= 125mvrms
V
在
= 62.5mvrms
g = +1
R
F
= 499
R
L
= 100
R
S
= 100
图示 16. 驱动器 小 和 大 信号 频率
回馈, g = +1