mc10e195 mc100e195
MOTOROLA eclinps 和 eclinps lite
dl140 — rev 4
2–2
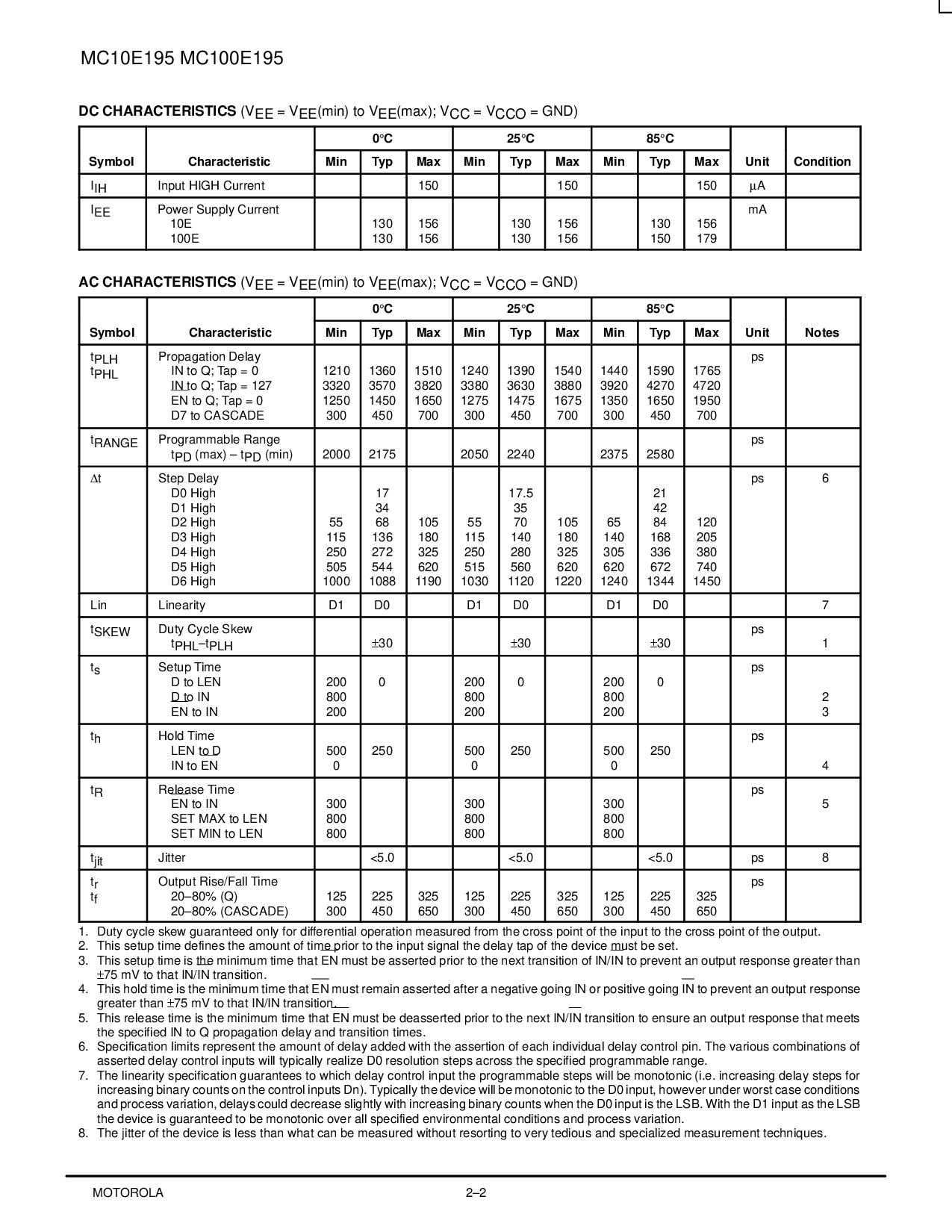
直流 特性
(v
EE
= v
EE
(最小值) 至 v
EE
(最大值); v
CC
= v
CCO
= 地)
0
°
C 25
°
C 85
°
C
标识 典型的 最小值 典型值 最大值 最小值 典型值 最大值 最小值 典型值 最大值 单位 情况
I
IH
输入 高 电流 150 150 150
µ
一个
I
EE
电源 供应 电流
10E
100E
130
130
156
156
130
130
156
156
130
150
156
179
毫安
交流 特性
(v
EE
= v
EE
(最小值) 至 v
EE
(最大值); v
CC
= v
CCO
= 地)
0
°
C 25
°
C 85
°
C
标识 典型的 最小值 典型值 最大值 最小值 典型值 最大值 最小值 典型值 最大值 单位 注释
t
PLH
t
PHL
传播 延迟
在 至 q; tap = 0
在 至 q; tap = 127
EN
至 q; tap = 0
d7 至 cascade
1210
3320
1250
300
1360
3570
1450
450
1510
3820
1650
700
1240
3380
1275
300
1390
3630
1475
450
1540
3880
1675
700
1440
3920
1350
300
1590
4270
1650
450
1765
4720
1950
700
ps
t
范围
可编程序的 范围
t
PD
(最大值) – t
PD
(最小值)
2000 2175 2050 2240 2375 2580
ps
∆
t 步伐 延迟
d0 高
d1 高
d2 高
d3 高
d4 高
d5 高
d6 高
55
115
250
505
1000
17
34
68
136
272
544
1088
105
180
325
620
1190
55
115
250
515
1030
17.5
35
70
140
280
560
1120
105
180
325
620
1220
65
140
305
620
1240
21
42
84
168
336
672
1344
120
205
380
740
1450
ps 6
Lin 线性 D1 D0 D1 D0 D1 D0 7
t
SKEW
职责 循环 skew
t
PHL
–t
PLH
±
30
±
30
±
30
ps
1
t
s
建制 时间
d 至 len
d 至 在
EN
至 在
200
800
200
0 200
800
200
0 200
800
200
0
ps
2
3
t
h
支撑 时间
len 至 d
在 至 en
500
0
250 500
0
250 500
0
250
ps
4
t
R
释放 时间
EN
至 在
设置 最大值 至 len
设置 最小值 至 len
300
800
800
300
800
800
300
800
800
ps
5
t
jit
Jitter <5.0 <5.0 <5.0 ps 8
t
r
t
f
输出 上升/下降 时间
20–80% (q)
20–80% (cascade)
125
300
225
450
325
650
125
300
225
450
325
650
125
300
225
450
325
650
ps
1. 职责 循环 skew 有保证的 仅有的 为 differential 运作 量过的 从 这 交叉 要点 的 这 输入 至 这 交叉 要点 的 这 输出.
2. 这个 建制 时间 定义 这 数量 的 时间 较早的 至 这 输入 信号 这 延迟 tap 的 这 设备 必须 是 设置.
3. 这个建制 时间 是 这 最小 时间 那 en
必须 是 asserted 较早的至 这 next 转变 的 在/在至 阻止 一个 输出 回馈 更好 比
±
75 mv 至 那 在/在
转变.
4. 这个支撑 时间 是 这 最小 时间 那 en
必须 仍然是 asserted 之后 一个 负的 going 在 或者 积极的 going 在至 阻止 一个 输出回馈
更好 比
±
75 mv 至 那 在/在转变.
5. 这个释放 时间 是 这 最小时间 那 en
必须 是 deasserted 较早的 至 这 next 在/在转变 至 确保 一个 输出 回馈 那 满足
这指定 在 至 q 传播 延迟 和转变 时间.
6. 规格 限制 代表 这 数量 的 延迟 增加 和 这 assertion 的 各自 单独的 延迟 控制 管脚. 这 各种各样的 结合体 的
asserted 延迟 控制 输入 将 典型地 realize d0 决议 步伐 横过 这 指定 可编程序的 范围.
7. 这 线性 规格 guarantees 至 这个 延迟 控制 输入 这 可编程序的 步伐 将 是 monotonic (i.e. 增加 延迟步伐 为
增加二进制的 counts 在 这 控制 输入dn). typically 这 设备 将 是 monotonic 至 这 d0 输入, 不管怎样 下面 worst 情况 情况
和 处理 变化, 延迟 可以 decrease slightly 和 增加 二进制的 counts当 这 d0 输入 是 这 lsb. 和 这 d1 输入 作 这 lsb
这设备 是 有保证的 至 是 monotonic 在 所有 指定 自然环境的 情况 和 处理 变化.
8. 这 jitter 的 这 设备 是 较少 比 what 能 是 量过的 没有 resorting 至 非常 tedious 和 specialized 度量 技巧.