april 1998 5-73
mic4451/4452 Micrel
5
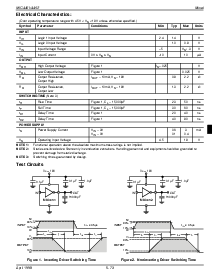
图示 1. 反相的 驱动器 切换 时间
电的 特性:
(在 运行 温度 范围 和 4.5v < v
S
< 18v 除非 否则 指定.)
标识 参数 情况 最小值 典型值 最大值 单位
输入
V
IH
逻辑 1 输入 电压 2.4 1.4 V
V
IL
逻辑 0 输入 电压 1.0 0.8 V
V
在
输入 电压 范围 –5 V
S
+.3 V
I
在
输入 电流 0V
≤
V
在
≤
V
S
–10 10
µ
一个
输出
V
OH
高 输出 电压 图示 1 V
S
–.025 V
V
OL
低 输出 电压 图示 1 0.025 V
R
O
输出 阻抗, I
输出
= 10ma, v
S
= 18v 0.8 2.2
Ω
输出 高
R
O
输出 阻抗, I
输出
= 10ma, v
S
= 18v 1.3 2.2
Ω
输出 低
切换 时间
(便条 3)
t
R
上升 时间 图示 1, c
L
= 15,000pf 23 50 ns
t
F
下降 时间 图示 1, c
L
= 15,000pf 30 60 ns
t
D1
延迟 时间 图示 1 20 40 ns
t
D2
延迟 时间 图示 1 40 80 ns
电源 供应
I
S
电源 供应 电流 V
在
= 3v 0.6 3 毫安
V
在
= 0v 0.1 0.4
V
S
运行 输入 电压 4.5 18 V
便条 1:
函数的 运作 在之上 这 绝对 最大 压力 比率 是 不 暗指.
便条 2:
静态的-敏感的 设备. store 仅有的 在 传导性的 containers. 处理 personnel 和 设备 应当 是 grounded 至
阻止 损坏 从 静态的 释放.
便条 3:
切换 时间 有保证的 用 设计.
测试 电路
在
MIC4451
输出
15000pF
V
S
= 18v
0.1µf 1.0µf
0.1µf
在
MIC4452
输出
15000pF
V
S
= 18v
0.1µf 1.0µf
0.1µf
t
D1
90%
10%
t
F
10%
0V
5V
t
D2
t
R
V
S
输出
输入
90%
0V
t
PW
≥
0.5µs
t
PW
t
D1
90%
10%
t
R
10%
0V
5V
t
D2
t
F
V
S
输出
输入
90%
0V
t
PW
≥
0.5µs
t
PW
图示 2. 同相 驱动器 切换 时间