AD743
rev. c–10–
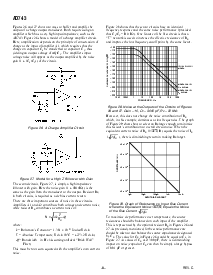
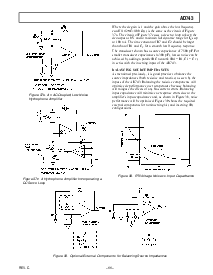
一个 输入-阻抗-补偿,
sallen-关键 过滤
这 简单的 高 通过 过滤 的 图示 35 有 一个 重要的 源
的 错误这个 是 常常 overlooked. 甚至 5 pf 的 输入电容
在 放大器 “a” 将 contribute 一个 额外的 1% 的 passband
振幅 错误, 作 好 作 扭曲量, 均衡的 至 这 c/v
特性 的 这 输入 接合面 电容. 这 增加
的 这 网络 designated “z” 将 balance 这 源
impedance–as seen 用 “a”–and 因此 eliminate 这些 errors.
图示 35. 一个 输入 阻抗 补偿
sallen-关键 过滤
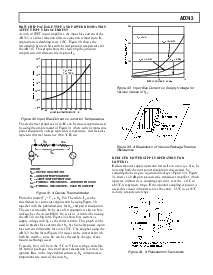
二 高 效能
accelerometer 放大器
二 的 这 大多数 popular 承担-输出 transducers 是hydrophones
和 accelerometers. 精确 accelerometers 是 典型地
校准 为 一个 承担 输出 (pc/g).* 计算数量 36a 和 36b
显示 二 方法 在 这个 至 配置 这 ad743 作 一个 低 噪音
承担 放大器 为 使用 和 一个 宽 多样性 的 piezoelectric
accelerometers. 这 输入 敏锐的 的 这些 电路 将 是
决定 用 这 值 的 电容 c1 和 是 equal 至:
∆
V
输出
=
∆
Q
输出
C
1
这 比率 的 电容 c1 至 这 内部的 电容 (c
T
) 的 这
transducer 确定 这 噪音 增益 的 这个 电路 (1 + c
T
/c1).
这 放大器 电压 噪音 将 呈现 在 它的 输出 amplified
用 这个 数量. 这 低 频率 带宽 的 这些 电路
将 是 依赖 在 这 值 的 电阻 r1. 如果 一个 “t” 网络
是 使用, 这 有效的 值 是: r1 (1 + r2/r3).
图示 36a. 一个 基本 accelerometer 电路
*pc = picocoulombs
g = earth's gravitational 常量
图示 36b. 一个 accelerometer 电路 employing 一个
直流 伺服 放大器
一个 直流 伺服-循环 (图示 36b) 能 是 使用 至 使确信 一个 直流 输出
这个 是 <10 mv, 没有 这 需要 为 一个 大 compensating
电阻 当 dealing 和 偏差 电流 作 大 作 100 na. 为
最优的 低 频率 效能, 这 时间 常量 的 这
伺服 循环 (r4c2 = r5c3) 应当 是:
时间 常量
≥
10
R
11
+
R
2
R
3
C
1
一个 低 噪音 hydrophone 放大器
hydrophones 是 通常地 校准 在 这 电压-输出 模式.
这 电路 的 计算数量 37a 和 37b 能 是 使用 至 amplify 这
输出 的 一个 典型 hydrophone. 图示 37a 显示 一个 典型 直流
结合 电路. 这 optional 电阻 和 电容 提供 至
counteract 这 直流 补偿 造成 用 偏差 电流 流 通过
电阻 r1. 图示 37b, 一个 变化 的 这 原来的 电路, 有 一个
低 频率 截止 决定 用 一个 rc 时间 常量 equal
至:
时间 常量
=
1
2
π×
C
C
×
100
Ω
图示 37a. 一个 基本 hydrophone 放大器