3
theory 的 运作
这 hctl-1100 是 一个 一般 pur-
pose 发动机 控制 这个
提供 位置 和 velocity
控制 为 直流, 直流 brushless 和
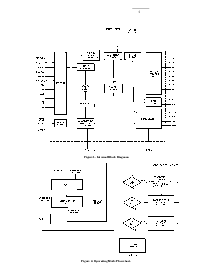
stepper 发动机. 这 内部的
块 图解 的 这 hctl-1100
是 显示 在 图示 1. 这 hctl-
1100 receives 它的 输入 commands
从 一个 host 处理器 和
位置 反馈 从 一个
incremental encoder 和 quadra-
ture 输出. 一个 8-位 bi-directional
多路复用 地址/数据 总线
接口 这 hctl-1100 至 这
host 处理器. 这 encoder
这 resident 位置 profile
发生器 calculates 这 neces-
sary profiles 为 trapezoidal pro-
文件 控制 和 integral velocity
控制. 这 hctl-1100 com-
pares 这 desired 位置 (或者
velocity) 至 这 真实的 位置 (或者
velocity) 至 计算 补偿
发动机 commands 使用 一个 pro-
grammable 数字的 过滤 d(z). 这
发动机 command 是 externally
有 在 这 发动机 command
端口 作 一个 8-位 字节 和 在 这
pwm 端口 作 一个 脉冲波 宽度
modulated (pwm) 信号.
这 hctl-1100 有 这 能力
的 供应 电子的 commu-
tation 为 直流 brushless 和
stepper 发动机. 使用 这
encoder 位置 信息, 这
发动机 阶段 是 使能 在 这
准确无误的 sequence. 这 commu-
tator 是 全部地 可编程序的 至
encompass 大多数 发动机/encoder
结合体. 在 增加, 阶段
overlap 和 阶段 进步 能 是
编写程序 至 改进 torque
波纹 和 高 速 执行-
ance. 这 hctl-1100 包含 一个
号码 的 flags 包含 二
externally 有 flags, profile
和 initialization, 这个 准许 这
用户 至 看 或者 审查 这 状态 的
这 控制. 它 也 有 二
emergency 输入, 限制 和 停止,
这个 准许 运作 的 这
hctl-1100 至 是 interrupted
下面 emergency 情况.
这 hctl-1100 控制 是 一个
digitally 抽样 数据 系统.
当 信息 从 这 host
处理器 是 accepted asyn-
chronously 和 遵守 至 这
控制 功能, 这 发动机
command 是 计算 在 一个
分离的 样本 时间 基准. 这
样本 计时器 是 可编程序的.
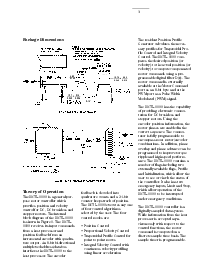
包装 维度
反馈 是 解码 在
quadrature counts 和 一个 24-位
计数器 keeps 追踪 的 位置.
这 hctl-1100 executes 任何 一个
的 四 控制 algorithms
选择 用 这 用户. 这 四
控制 模式 是:
• 位置 控制
• 均衡的 velocity 控制
• trapezoidal profile 控制 为
要点 至 要点 moves
• integral velocity 控制 和
持续的 velocity profiling
使用 直线的 acceleration
4.83
0.190
1.27
0.050
±
0.15
0.006
0-15
°
13.72
0.540
13.72
0.540
0.25
0.010
±