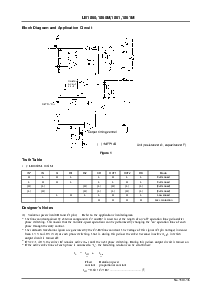
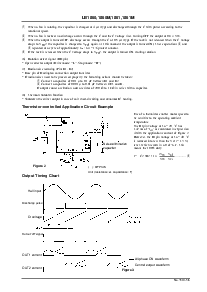
块 图解 和 应用 电路
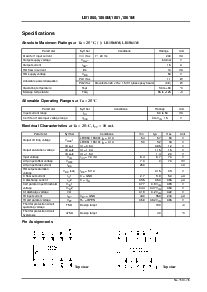
真实 表格
( ): lb1860m, 1861M
在
+
在
–
Ct Rt1 Rt2 CR OUT1 OUT2 RD 模式
H L H L — L H L L 全部 速
L H H L — L L H L 全部 速
(h) (l) — — (h) (l) (h) (l) (l) (全部 速)
(l) (h) — — (h) (l) (l) (h) (l) (全部 速)
— — L H L L H H L 低 速
————— HHHH 锁 保护
Designer’s 注释
(1) 能变的-速 电路 (rt 和 Ct 管脚) — 谈及 至 这 应用 电路 图解
.
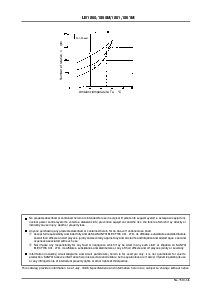
这 时间 常量 gained 用 外部 组件 C2 和 R2 是 使用 至 设置 这 长度 的 一个 ‘off’ 运作 时间 时期 之后
阶段 切换. 这个 意思 那 这 能变的-速 行动 能 是 执行 用 changing 这 ‘on’ 运作 时间 的 各自
阶段 通过 这 职责 控制.
.
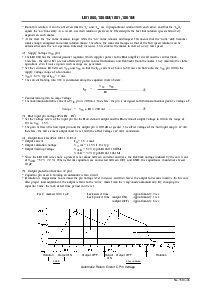
这 sawtooth 波形 信号 是 发生 用 这 c2-r2 时间 常量. 这 电压 的 这个 信号 (ct 管脚 电压) 增加
从 1.3 V 至 4.0 V (vct) 在 各自 阶段 切换. 那 是, 在 这个 时期, 这 驱动器 变为 inactive (t
止
), 在 这个
输出 电路 是 转变 止.
.
如果 V
CC
^
4.0 v, 这 驱动器 IC 仍然是 起作用的 (t
在
) 直到 这 next 阶段 切换. 在 这个 时期, 输出 电路 是 转变 在.
.
如果 这 起作用的 驱动 时间 的 各自 阶段 是 assumed 至 ‘t
o
’, 这 下列的 relation 能 是 established:
t
o
=t
止
+t
在
↑↑
Fixed 旋转 速
常量 均衡的 常量
t
止
= 0.69
c
C2
c
R2 ........................................
1
常量
电流
电路
输出 定时 控制
单位 (阻抗:
Ω
, 电容: f)
图示 1
( ): MFP14S
0.47 至 10 µ
lb1860,1860m,1861,1861m
非.3519-3/6