ad2s81a/ad2s82a
rev. b –13–
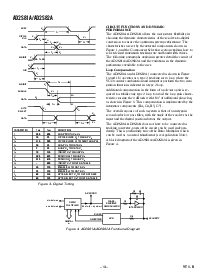
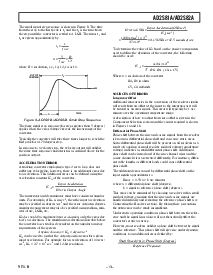
这 小 信号 步伐 回馈 是 显示 在 图示 8. 这 时间
从 这 步伐 至 这 第一 顶峰 是 t
1
和 这 t
2
是 这 时间 从
这 步伐 直到 这 转换器 是 settled 至 1 lsb. 这 时间 t
1
和
t
2
是 给 大概 用
t
1
=
1
f
BW
t
2
=
5
f
BW
×
R
12
在哪里
R
= 决议, i.e., 10, 12, 14 或者 16.
时间
输出
位置
t
1
t
2
图示 8. ad2s81a/ad2s82a 小 步伐 回馈
这 大 信号 步伐 回馈 (为 步伐 更好 比 5 degrees)
应用 当 这 错误 电压 超过 这 直线的 范围 的 这
转换器.
典型地 这 转换器 将 引领 三 时间 变长 至 reach 这
第一 顶峰 为 一个 179 degrees 步伐.
在 回馈 至 一个 velocity 步伐, 这 velocity 输出 将 展览
这 一样 时间 回馈 特性 作 概述 在之上 为 这
位置 输出.
acceleration 错误
一个 追踪 转换器 employing 一个 类型 2 伺服 循环 做 不
suffer 任何 velocity lag, 不管怎样, 那里 是 一个 额外的 错误 预定的
至 acceleration. 这个 额外的 错误 能 是 定义 使用 这
acceleration 常量
K
一个
的 这 转换器.
K
一个
=
输入 Acceleration
错误 在 输出 角度
这 numerator 和 denominator 必须 有 consistent angular
单位. 为 例子, 如果 k
一个
是 在 秒
–2
, 然后 这 输入 acceleration
将 是 指定 在 degrees/秒
2
和 这 错误 输出 在 degrees.
angular 度量 将 也 是 指定 使用 radians, 最小值-
utes 的 arc, lsbs, 等
K
一个
做 不 定义 最大 输入 acceleration,
仅有的 这 错误 预定的
至 它’s acceleration. 这 最大 acceleration 容许的 在之前
这 转换器 loses 追踪 是 依赖 在 这 angular 精度
(所需的)东西 的 这 系统.
angular 精度
×
K
一个
=
degrees
/
秒
2
K
一个
能 是 使用 至 预言 这 输出 位置 错误 为 一个 给
输入 acceleration. 为 例子 为 一个 acceleration 的 100 revs/
秒
2
, k
一个
= 2.7
×
10
6
秒
–2
和 12-位 决议.
至 决定 这 值 的
K
一个
为基础 在 这 被动的 组件
使用 至 定义 这 dynamics 的 这 转换器, 这 下列的
应当 是 使用:
K
一个
=
4.04
×
10
11
2
n
⋅
R
6
⋅
R
4
⋅
(
C
4
+
C
5)
在哪里
n
= 决议 的 这 转换器
R
4,
R
6 在 ohms
C
5,
C
4 在 farads
来源 的 errors
积分器 补偿
额外的 不精确 在 这 转换 的 这 resolver 信号
将 结果 从 一个 补偿 在 这 输入 至 这 积分器 作 它 将
是 treated 作 一个 错误 信号. 这个 错误 将 典型地 是 1 arc
分钟 在 这 运行 温度 范围.
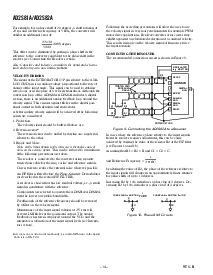
一个 描述 的 如何 至 调整 从 零 补偿 是 给 在 这
组件 选择 部分 和 这 电路 必需的 是 显示
在 计算数量 1a 和 1b.
差别的 阶段 变换
阶段 变换 在 这 sine 和 cosine 信号 从 这 resolver
是 知道 作 差别的 阶段 变换 和 能 导致 静态的 错误.
一些 差别的 阶段 变换 将 是 呈现 在 所有 resolvers 作 一个
结果 的 连接. 一个 小 resolver residual 电压 (quadrature
电压) indicates 一个 小 差别的 阶段 变换. 额外的
阶段 变换 能 是 introduced 如果 这 sine 频道 线 和 这
cosine 频道 线 是 treated differently. 为 instance, differ-
ent 缆索 长度 或者 不同的 负载 可以 导致 差别的
阶段 变换.
这 额外的 错误 造成 用 差别的 阶段 变换 在 这
输入 信号 approximates 至
错误 = 0.53 一个
×
b arc 分钟
在哪里 一个 = 差别的 阶段 变换 (degrees).
b = 信号 至 涉及 阶段 变换 (degrees).
这个 错误 能 是 使减少到最低限度 用 choosing 一个 resolver 和 一个 小
residual 电压, ensuring 那 这 sine 和 cosine 信号 是
处理 相(恒)等 和 removing 这 涉及 阶段 变换 (看
连接 这 resolver 部分). 用 带去 这些 预防措施
这 extra 错误 能 是 制造 微不足道的.
下面 静态的 运行 情况 阶段 变换 在 这 谈及-
ence 和 这 信号 线条 alone 将 不 theoretically 影响 这
转换器’s 静态的 精度.
不管怎样, 大多数 resolvers 展览 一个 阶段 变换 在 这 信号
和 这 涉及. 这个 阶段 变换 将 给 上升 下面 动态
情况 至 一个 额外的 错误 定义 用:
Shaft 速
(
rps
)
×
阶段 变换
(
Degrees
)
涉及 频率
错误 在 LSBs
输入 Acceleration LSB
K
rev
LSBs 或者 的 arc
一个
=
=
×
×
=
[/]
[]
[/ ]
.
..
–
秒
秒
秒
秒
2
2
12
6
100 2
27 10
015 475
2