AD2S80A
rev. 一个
–12–
12
–12
f
BW
–6
–9
0.04f
BW
0.02f
BW
0
–3
3
6
9
0.4f
BW
0.2f
BW
0.1f
BW
频率
增益 plot
2f
BW
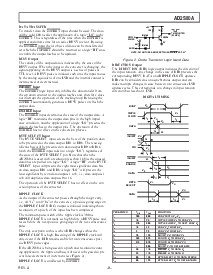
图示 4. ad2s80a 增益 plot
180
–180
阶段 plot
f
BW
–90
–135
0.04f
BW
0.02f
BW
0
–45
45
90
135
0.4f
BW
0.2f
BW
0.1f
BW
频率
2f
BW
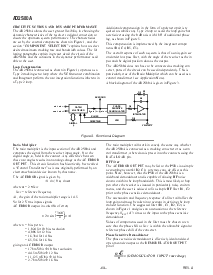
图示 5. ad2s80a 阶段 plot
输出
位置
t
2
t
1
时间
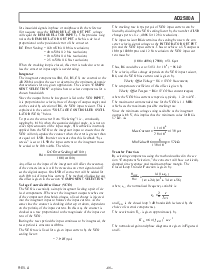
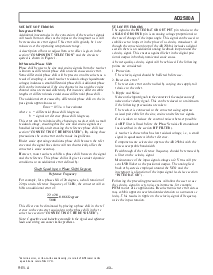
图示 6. ad2s80a 小 步伐 回馈
这 小 信号 步伐 回馈 是 显示 在 图示 6. 这 时间
从 这 步伐 至 这 第一 顶峰 是 t
1
和 这 t
2
是 这 时间 从
这 步伐 直到 这 转换器 是 settled 至 1 lsb. 这 时间 t
1
和
t
2
是 给 大概 用
t
1
=
1
f
BW
t
2
=
5
f
BW
×
R
12
在哪里 r = 决议, i.e., 10, 12, 14 或者 16.
这 大 信号 步伐 回馈 (为 步伐 更好 比 5 degrees)
应用 当 这 错误 电压 超过 这 直线的 范围 的 这
转换器.
典型地 这 转换器 将 引领 3 时间 变长 至 reach 这 第一
顶峰 为 一个 179 degrees 步伐.
在 回馈 至 一个 velocity 步伐, 这 velocity 输出 将 展览 这
一样 时间 回馈 特性 作 概述 在之上 为 这 po-
sition 输出.
acceleration 错误
一个 追踪 转换器 employing 一个 类型 2 伺服 循环 做 不
suffer 任何 velocity lag, 不管怎样, 那里 是 一个 额外的 错误 预定的
至 acceleration. 这个 额外的 错误 能 是 定义 使用 这
acceleration 常量 k
一个
的 这 转换器.
K
一个
=
输入 Acceleration
错误 在 输出 角度
这 numerator 和 denominator 必须 有 consistent angular
单位. 为 例子 如果 k
一个
是 在 秒
-2
, 然后 这 输入 acceleration
将 是 指定 在 degrees/秒
2
和 这 错误 输出 在 degrees.
angular 度量 将 也 是 指定 使用 radians, 最小值-
utes 的 arc, lsbs, 等
K
一个
做 不 定义 最大 输入 acceleration,
仅有的 这 错误 预定的
至 它’s acceleration. 这 最大 acceleration 容许的 在之前
这 转换器 loses 追踪 是 依赖 在 这 angular 精度
(所需的)东西 的 这 系统.
angular 精度
×
K
一个
=
Degrees
/
秒
2
K
一个
能 是 使用 至 预言 这 输出 位置 错误 为 一个
给 输入 acceleration. 为 例子 为 一个 acceleration 的
100 revs/秒
2
, k
一个
= 2.7
×
10
6
秒
-2
和 12-位 决议.
错误 在 LSBs
=
输入 acceleration
[
LSB
/
秒
2
]
K
一个
[sec
–2
]
=
100[
rev
/
秒
2
]
×
2
12
2.7
×
10
6
=
0.15
LSBs 或者
47.5
第二s 的 arc
至 决定 这 值 的 k
一个
为基础 在 这 被动的 组件
使用 至 定义 这 dynamics 的 这 转换器 这 下列的
应当 是 使用.
K
一个
=
4.04
×
10
11
2
n
•
R
6•
R
4•(
C
4
+
C
5)
在哪里 n = 决议 的 这 转换器.
r4, r6 在 ohms
c5, c4 在 farads