硅 image, 公司
sii 161
一个
SiI
-DS-0009-D
硅 image, 公司
5 主题 至 改变 没有 注意
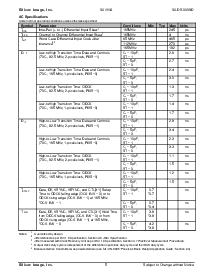
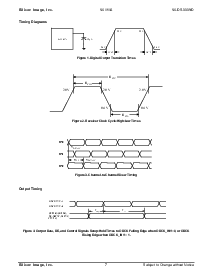
交流 规格
下面 正常的 运行 情况 除非 否则 指定.
标识 参数 情况 最小值 典型值 最大值 单位
T
DPS
Intra-一双 (+ 至-) differential 输入 skew
1
165MHz 245 ps
T
CCS
频道 至 频道 差别的 输入 skew
1
165MHz 4 ns
T
IJIT
worst 情况 差别的 输入 时钟 jitter 65 mhz 465 ps
容忍
2,3
112 mhz 270 ps
165 mhz 182 ps
D
LHT
低-至-高 转变 时间: data 和 控制
(70 c, 82.5 mhz, 2-pixel/时钟, pixs=1)
C
L
= 10pf;
st = 1
2.6
ns
C
L
= 5pf;
st = 0
2.7 ns
低-至-高 转变 时间: 数据 和 控制
(70 c, 165 mhz, 1-pixel/时钟, pixs=0)
C
L
= 10pf;
st = 1
2.4
ns
C
L
= 5pf;
st = 0
3.0 ns
低-至-高 转变 时间: odck
(70 c, 82.5 mhz, 2-pixel/时钟, pixs=1)
C
L
= 10pf;
st = 1
1.3 ns
C
L
= 5pf;
st = 0
1.7 ns
低-至-高 转变 时间: odck
(70 c, 165 mhz, 1-pixel/时钟, pixs=0)
C
L
= 10pf;
st = 1
1.4 ns
C
L
= 5pf;
st = 0
1.7 ns
D
HLT
高-至-低 转变 时间: 数据 和 控制
(70 c, 82.5 mhz, 2-pixel/时钟, pixs=1)
C
L
= 10pf;
st = 1
2.8 ns
C
L
= 5pf;
st = 0
3.4 ns
高-至-低 转变 时间: 数据 和 控制
(70 c, 165 mhz, 1-pixel/时钟, pixs=0)
C
L
= 10pf;
st = 1
2.3
ns
C
L
= 5pf;
st = 0
3.3 ns
高-至-低 转变 时间: odck
(70 c, 82.5 mhz, 2-pixel/时钟, pixs=1)
C
L
= 10pf;
st = 1
1.1 ns
C
L
= 5pf;
st = 0
1.5 ns
高-至-低 转变 时间: odck
(70 c, 165 mhz, 1-pixel/时钟, pixs=0)
C
L
= 10pf;
st = 1
1.2 ns
C
L
= 5pf;
st = 0
1.5 ns
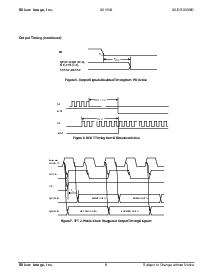
T
建制
数据, de, vsync, hsync, 和 ctl[3:1] 建制
时间 至 odck 下落 边缘 (ock_inv = 0) 或者 至
odck rising 边缘 (ock_inv = 1) 在 165 mhz
C
L
= 10pf;
st = 1
0.7
*0.7
ns
*ock_inv = 1 C
L
= 5pf;
st =0
0.7
*0.4
ns
T
支撑
数据, de, vsync, hsync, 和 ctl[3:1] 支撑 时间
从 odck 下落 边缘, (ock_inv = 0) 或者 从
odck rising 边缘 (ock_inv = 1) 在 165 mhz,
C
L
= 10pf;
st = 1
3.8
*3.8
ns
*ock_inv = 0 C
L
= 5pf;
st = 0
4.2
*3.8
ns
注释:
1
Guaranteed 用 设计.
2
jitter 定义 作 每 dvi 1.0 规格, 部分 4.6
jitter 规格
.
3
jitter 量过的 和 时钟 恢复 单位 作 每 dvi 1.0 规格, 部分 4.7
电的 度量 程序
.
4
输出 时钟 职责 循环 是 independent 的 这 差别的 输入 时钟 职责 循环 和 这 idck 职责 循环.
5
量过的 当 传输者 是 powered 向下 (看 si
I
/一个-0005 “panellink 基本 设计/应用 手册,” 部分 2.4).