7
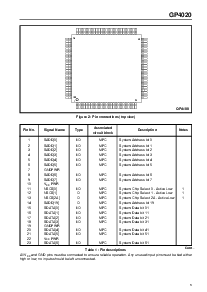
GP4020
注释 (持续):
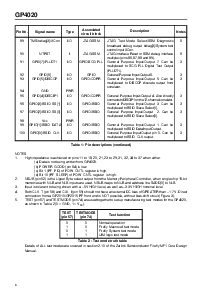
6. nice (管脚 84) 和 nrst (管脚 90) 控制 一个 号码 的 运作 模式 和 一个 debug 在 信号 multiplex 在 管脚
86 至 90 作 跟随:
nice = 低 arm7tdmi 在 ice 模式.
arm7tdmi 将 不 进入 记忆 除非 instructed 用 这 jtag 接口. ntrst
(管脚 90) 设置 低 将 重置 这 jtag.
nice = 高 arm7tdmi 在 正常的 模式.
arm7tdmi 做 不 效应 这 重置 在 这 jtag inteface. 不管怎样, 一个 重置 的 firefly
将 也 重置 这 jtag.
ntrst (管脚 90) 有 一个 重置 和 信号-multiplex 函数, 依赖 在 这 状态 的 nice (pin 84):
(i) nice = 低:
jtag debug 信号 连接 至 管脚 86, 87, 88, 89 &放大; 90, 作 follows:
管脚 86 = tck = jtag 时钟 在
管脚 87 = tdi = jtag 数据 在
管脚 88 = tdo = jtag 数据 输出
管脚 89 = tms = jtag 模式 选择 在
管脚 90 = ntrst = 起作用的 低 重置 至 jtag 接口
(jtag 接口 也 重置 当 firefly mf1 是 重置)
(ii) nice = 高 和 ntrst = 高:
正常的 模式 的 运作 为 gp4020. 系统 维护 单元 broadcast diagnostic debug 输出
信号 连接 至 管脚 86, 87, 88, 89 作 跟随:
管脚 86 = bdiag[0]
管脚 87 = bdiag[1]
管脚 88 = bdiag[2]
管脚 89 = bdiag[3]
diagnostic 模式 必须 有 被 设置-向上 使用 这 diagnostic 配置 寄存器 在里面 firefly mf1.
谈及 至 部分 8 的 firefly mf1 核心 设计 手工的 (dm5003), 从 zarlink 半导体, 为 更多
信息.
(iii) nice = 高 &放大; ntrst = 低:
firefly mf1 系统 测试 控制 输入 信号 连接 至 管脚 86, 87, 88, 89 作 跟随:
管脚 86 = xreq
管脚 87 = xwrite
管脚 88 = xburst
管脚 89 = xcon
系统 测试 输入 是 使用 在 firefly mf1 macrocell 测试 模式 为 制造 测试. 谈及 至 部分 2.10
的 firefly mf1 核心 设计 手工的 (dm5003), 从 zarlink 半导体, 为 更多 信息.
glossary:
1PPS 1 脉冲波 每 第二
ARM® 先进的 risc machines
ARM7TDMI™ arm7 微处理器 和 thumb,
debug, 快 乘法器 和 ice breaker
Extensions
B
µ
ILD 总线 为
µ
控制 integration 在 低-
电源 设计
b_clk B
µ
ild 总线 系统 时钟
BSIO B
µ
ild 串行 输入 / 输出
CORR 12-频道 correlator
DMAC 直接 记忆 进入 控制
firefly mf1 zarlink 半导体
微控制器 cell, 为基础 在
arm7tdmi, dmac, intc, mpc,
systic 和 uart
GPIO 一般 目的 输入 / 输出
GPS global 安置 系统
ICE 在 电路 emulation
INTC 中断 控制
MPC 记忆 附带的 控制
PCL 附带的 控制 逻辑
PLL 阶段 锁 循环
内存 随机的 进入 记忆
只读存储器 读 仅有的 记忆
RTC real 时间 时钟
SCG 系统 时钟 发生器
SSM 系统 维护 单元
SYSTIC 系统 计时器 / 计数器 单元
TIC 计时器 / 计数器
UART 普遍的 异步的 接受者/
传输者
UIM 向上-integration 单元
WDOG 看门狗