飞利浦 半导体
SC16C550
uart 和 16-字节 先进先出 和 irda encoder/解码器
产品 数据 rev. 05 — 19 六月 2003 12 的 52
9397 750 11619
© koninklijke 飞利浦 electronics n.v. 2003. 所有 权利 保留.
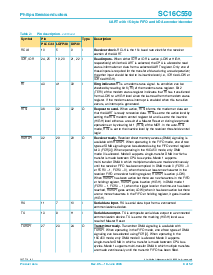
6.3.2 自动-cts (看 图示 5)
这 传输者 电路系统 checks CTS 在之前 sending 这 next 数据 字节. 当 CTS 是
起作用的, 它 发送 这 next 字节. 至 停止 这 传输者 从 sending 这 下列的 字节,
cts 必须 是 released 在之前 这 middle 的 这 last 停止 位 那 是 目前 正在
sent (看 图示 6). 这 自动-cts 函数 减少 中断 至 这 host 系统.
当 flow 控制 是 使能, cts 水平的 改变 做 不 触发 host 中断
因为 这 设备 automatically 控制 它的 自己的 传输者. 没有 自动-cts, 这
传输者 发送 任何 数据 呈现 在 这 transmit 先进先出 和 一个 接受者 overrun 错误
将 结果.
6.3.3 enabling autoflow 控制 和 自动-cts
autoflow 控制 是 使能 用 设置 增强 特性 寄存器 位 6 和 7
(autoflow 使能 或者 afe) 至 一个 ‘1’.
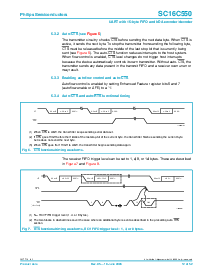
6.3.4 自动-cts 和 自动-rts 函数的 定时
这 接受者 先进先出 触发 水平的 能 是 设置 至 1, 4, 8, 或者 14 字节. 这些 是 描述
在 图示 7和 图示 8.
(1) 当 cts 是 低, 这 传输者 keeps sending 串行 数据 输出.
(2) 如果 CTS 变得 高 在之前 这 middle 的 这 last 停止 位 的 这 电流 字节, 这 传输者 finishes sending 这 电流 字节,
但是 是 做 不 send 这 next 字节.
(3) 当 cts 变得 从 高 至 低, 这 传输者 begins sending 数据 又一次.
图 6. cts 函数的 定时 波形.
开始 位 0-7 开始 位 0-7 开始 位 0-7stop 停止 STOPTX
CTS
002aaa049
(1) N = RCV 先进先出 触发 水平的 (1, 4, 或者 8 字节).
(2) 这 二 blocks 在 dashed 线条 覆盖 这 情况 在哪里 一个 额外的 字节 是 sent 作 描述 在 这 preceding 自动-rts
部分.
图 7. rts 函数的 定时 波形, rcv 先进先出 触发 水平的 = 1, 4, 或者 8 字节.
开始 字节 n 开始 字节 n + 1 开始 BYTESTOP 停止 STOPRX
RTS
IOR
(rd rbr)
N N+112
002aaa050