MC145750
MOTOROLA
7
设备 描述
π
/4–shift qpsk encoding
RCR标准 (std–28) specifies 这 基本 配置
的 这个 调制 scheme 作 显示 在 图示 2. 第一, 串行
数据输入 是 转变 至 xk/yk 并行的 streams. 然后 它的
值是 对照的 和 一个 previous 标识 ik/qk, respec-
tively,whether 或者 不 那里 是 一个改变 的 极性. 如果 那里 是 一个
改变,结果 是 coded 作 1. 这个 two–bit
π
r (di–bit) 是 called
标识,hence 标识 比率 是 justhalf 的 这 数据 输入 比率 至
是 modulated.
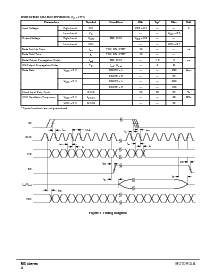
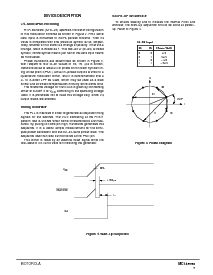
阶段transitions 是 决定 作 显示 在 图示 3,
和遵守 至 四 di–bit 值 的 xk, yk. (作 是 显示,
那里应当 是 在 least
π
/4 的 阶段变换 在 各自 标识 tim-
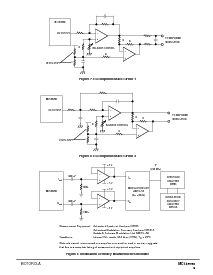
ing 不像 plain qpsk.) 真实的 in–phase 输出 是 喂养 至 一个
quadraturemodulator电路, 和 它 是 推荐 那 一个
2– 至 3–order lpf 是 使用, 这个 将 是 使用 作 一个 水平的
shifter和 直流 的fset 补偿 电路系统 在 这 一样 时间.
这 涉及 电压 为 这 dacs 是 给 用 连接
也 的 daref1:3 至 v
DD
符合 至 这 运行 电压
使用.它 是 preferable 不至 有 这个 电压 相异, 自从 i/q
输出 水平 是 影响.
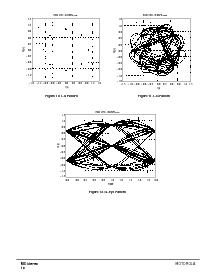
定时 发生器
这pll 是 将 在 顺序 至 发生 所有 必需的 定时
信号为 这设备. 这 vco oscillating 在 这 pn511
模式比率 是 使用 当 一些 特性 是 mea-
sured.用 拉 mode0 管脚 高, 这 设备 发生这个
sequence.它 是 一个 有用的 简单的 度量 为 这 occu-
pied电源 带宽 和 这 out–of–band 电源 水平的. 这
sequence 它自己 能 也 是 监控 在 这 pno 管脚.
这个电路 是 重置 用 一个 外部 重置 信号 当 这
low–state 的 ds 是 不 有效的 为 initializing 这 发生器.
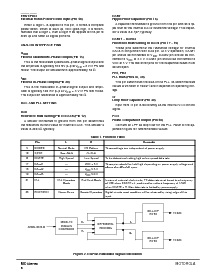
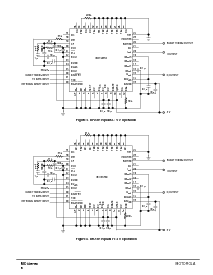
start–up sequence
至确保 稳固 和 至 initialize 这 内部的 只读存储器和
encoder, 这 start–up sequence 应当 是 完毕 在 power–
向上. 谈及 至 图示 4.
di–bit 输入
Xk Yk
阶段 变换
0 0
0 1
1 0
1 1
π
/4
3
π
/4
–
π
/4
– 3
π
/4
图示 3. 阶段 图解
Q
00
01
11
10
I
22.5
°
图示 4. start–up sequence
V
DD
REST
/pdn
DS
90%
> 100
µ
s
1 s