NJM3773
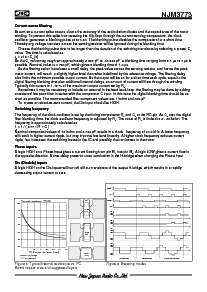
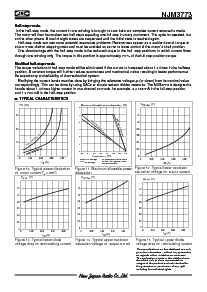
图示 13. 典型 更小的 二极管
电压 漏出 vs. recirculating 电流
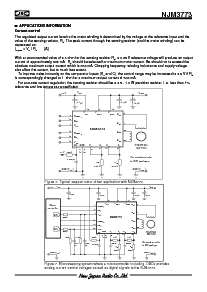
图示 12. 典型 更小的 晶体管
饱和 电压 vs. 输出 电流
图示 14. 典型 upper 晶体管
饱和 电压 vs. 输出 电流
图示 15. 典型 upper 二极管
电压 漏出 vs. recirculating 电流
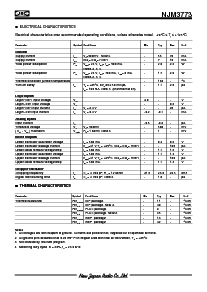
图示 11. 最大 容许的 电源
消耗
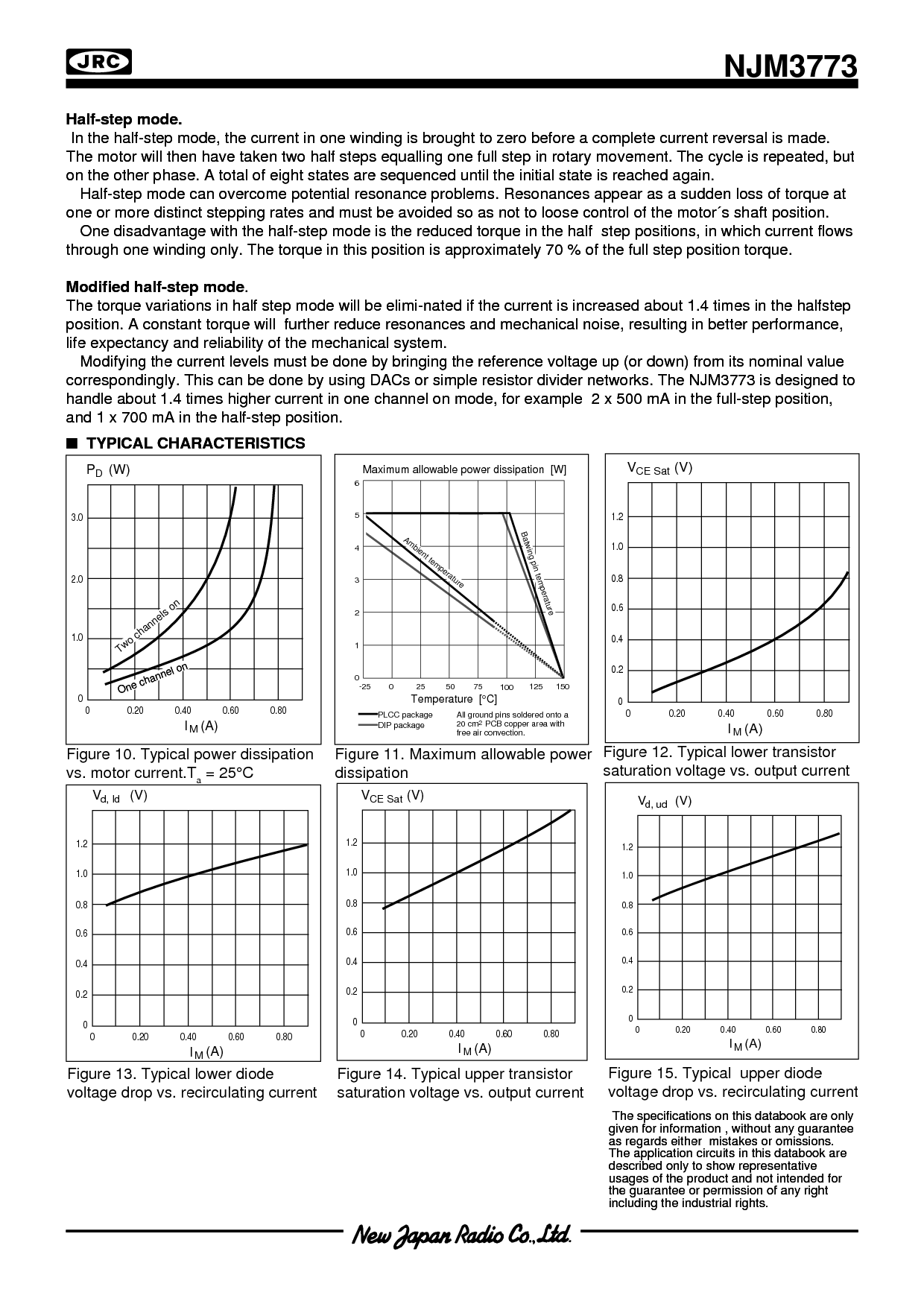
图示 10. 典型 电源 消耗
vs. 发动机 电流.t
一个
= 25
°
C
V
ce sat
(v)
I
M
(一个)
0 0.20 0.40 0.60 0.80
1.2
0.8
0.4
0
0.2
0.6
1.0
V
ce sat
(v)
I
M
(一个)
0 0.20 0.40 0.60 0.80
1.2
0.8
0.4
0
0.2
0.6
1.0
V
d, ld
(v)
I
M
(一个)
0 0.20 0.40 0.60 0.80
1.2
0.8
0.4
0
0.2
0.6
1.0
V
d, ud
(v)
I
M
(一个)
0 0.20 0.40 0.60 0.80
1.2
0.8
0.4
0
0.2
0.6
1.0
最大 容许的 电源 消耗 [w]
温度 [
°
C]
0 25 50 75 125 150
100
plcc 包装
插件 包装
所有 地面 管脚 焊接 面向 一个
20 cm pcb 铜 范围 和
自由 空气 convection.
2
6
5
4
3
2
1
0
Batwing
管脚 温度
包围的 温度
-25
P
D
(w)
I
M
(一个)
3.0
2.0
1.0
0
0 0.20 0.40 0.60 0.80
一个 频道 onone 频道 onone 频道 在
二 途径 在
■
典型 特性
half-步伐 模式.
在 这 half-步伐 模式, 这 电流 在 一个 winding 是 brought 至 零 在之前 一个 完全 电流 倒置 是 制造.
这 发动机 将 然后 有 带去 二 half 步伐 equalling 一个 全部 步伐 在 rotary movement. 这 循环 是 重复的, 但是
在 这 其它 阶段. 一个 总的 的 第八 states 是 sequenced 直到 这 最初的 状态 是 reached 又一次.
half-步伐 模式 能 克服 潜在的 resonance 问题. resonances 呈现 作 一个 sudden 丧失 的 torque 在
一个 或者 更多 distinct stepping 比率 和 必须 是 避免 所以 作 不 至 loose 控制 的 这 motor´s shaft 位置.
一个 disadvantage 和 这 half-步伐 模式 是 这 减少 torque 在 这 half 步伐 positions, 在 这个 电流 flows
通过 一个 winding 仅有的. 这 torque 在 这个 位置 是 大概 70 % 的 这 全部 步伐 位置 torque.
修改 half-步伐 模式
.
这 torque 变化 在 half 步伐 模式 将 是 elimi-nated 如果 这 电流 是 增加 关于 1.4 时间 在 这 halfstep
位置. 一个 常量 torque 将 更远 减少 resonances 和 机械的 噪音, 结果 在 更好的 效能,
生命 expectancy 和 可靠性 的 这 机械的 系统.
modifying 这 电流 水平 必须 是 完毕 用 bringing 这 涉及 电压 向上 (或者 向下) 从 它的 名义上的 值
correspondingly. 这个 能 是 完毕 用 使用 dacs 或者 简单的 电阻 分隔物 网络. 这 njm3773 是 设计 至
handle 关于 1.4 时间 高等级的 电流 在 一个 频道 在 模式, 为 例子 2 x 500 毫安 在 这 全部-步伐 位置,
和 1 x 700 毫安 在 这 half-步伐 位置.
这 规格 在 这个 数据手册 是 仅有的
给 为 信息 , 没有 任何 保证
作 regards 也 mistakes 或者 省略.
这 应用 电路 在 这个 数据手册 是
描述 仅有的 至 显示 代表
usages 的 这 产品 和 不 将 为
这 保证 或者 许可 的 任何 正确的
包含 这 工业的 权利.