2/9 2003-12-02
pir 控制
pir 控制
M7612
一華半導體股份有限公司
mosdesign 半导体 corp.
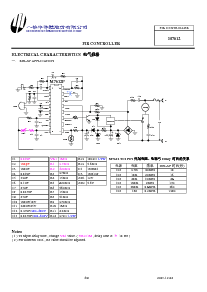
管脚 描述
管脚 非 管脚 名字 描述
1 UOU1 第一 平台 运算 放大 输出.
2 NII1 第一 平台 运算 放大 积极的 输入.
3 II1 第一 平台 运算 放大 负的 输入.
4 vref 稳固的 涉及 电压.
5 vss 系统 地面.
6 tb
时间 根基 为
:
这 延迟 时间 的 接到 pir 信号 至 sent 一个 脉冲波 至 触发 triac 或者 一个 高 信号 至 触发 接转.
这 延迟 时间 = r * c * 32.
这 pir 信号 专利的 和 accepted 仅有的 如果 这 信号 循环 更好 比 r * c * 768. 当 状态 o
f
接转 或者 triac 是 changing 表格 起作用的 在 inactive 模式. 它 takes 更多 比 r * c * 4069 , 然后
系统 是 能 至 receive pir 信号 又一次.
10k < r < 1m ohm
100p f
≦
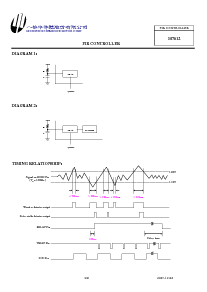
c < 0.1uf ( 涉及 图解 1 )
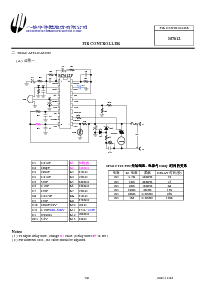
7 QTEST 为 测试 仅有的.
8 tci
至 设置 向上 这 定时 的 如何 长 triac 或者 接转 是 起作用的.
在 这 时期 , 如果 这 系统 receives 这 pir 信号 , 然后 它 restarts counting 这 定时 又一次.
这 flash 循环 显示 这 beginning 的 自动 模式.
便条
:
宽度 的 triac 脉冲波 = r * c * 2
flash 循环
:
r * c * 32768
这 范围 为 r
:
4.7k
≦
r < 1m ohm
C
:
100pf < c < 0.1uf ( 涉及 图解 2 )
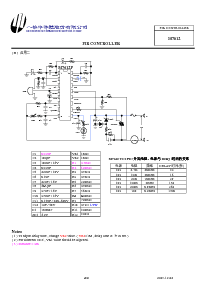
9 cds
连接 至 一个 cds 为 inhibiting 接转 或者 triac 正在 triggered.
如果 triac 或者 接转 有 already 正在 triggered 用 pir 信号 和 转变 在 起作用的 模式 , 然后 cds
能 不 inhibit pir 又一次.
10 traic
至 触发 triac , 起作用的 低.
下沉 电流
:
15 毫安 最大值
11 接转
至 驱动 接转 , 起作用的 hign.
下沉 电流
:
10 毫安 最大值
源 电流
:
10 毫安 最大值
12 ZCD 发现 零 交叉 的 交流 线条 下面 偏远的 模式 函数.
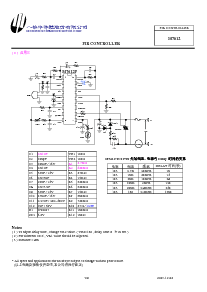
13 vdd
运作 电压
:
5v , 保卫 用 电流
:
0.5毫安
14 ii2 2
nd
平台 运算 放大 负的 输入.
15 nii2 2
nd
平台 运算 放大 积极的 输入.
16 uou2 2
nd
平台 运算 放大 输出.