2002 六月 24 8
飞利浦 半导体 产品 规格
I
2
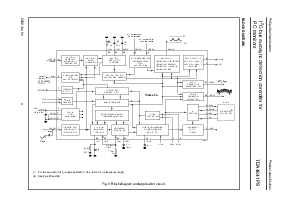
c-总线 autosync deflection 控制 为
pc monitors
TDA4841PS
这 formulae 为 R
HBUF
additionally takes 在 账户 这
电压 摆动 横过 这个 电阻:
pll1 阶段 探测器
这 阶段 探测器 是 一个 标准 类型 使用 切换
电流 来源, 这个 是 独立 的 这 horizontal
频率. 它 比较 这 middle 的 horizontal 同步 和
一个 fixed 要点 在 这 振荡器 sawtooth 电压. 这 PLL1
循环 过滤 是 连接 至 hpll1 (管脚 26).
看 也 部分 “horizontal 位置 调整 和
corrections”.
horizontal 位置 调整 和 纠正
通过 寄存器 HPOS 这 I
2
c-总线 准许 一个 直线的 调整
的 这 相关的 阶段 在 这 horizontal 同步 和
振荡器 sawtooth (在 pll1 循环). once 调整, 这
相关的 阶段 仍然是 常量 在 这 全部的 频率
范围.
通过 寄存器 hparal 和 hpinbal 纠正 的 管脚
不平衡 和 parallelogram 是 达到 用 调节
这 阶段 在 振荡器 sawtooth 和 horizontal
flyback (在 循环 pll2). 如果 那些 asymmetric EW 纠正
是 执行 在 这 deflection 平台, 两个都 寄存器 能
是 disconnected 从 horizontal 阶段 通过 控制 位 acd.
这个 做 不 改变 这 输出 在 管脚 ascor.
horizontal moire cancellation
至 达到 一个 cancellation 的 horizontal moire (也 知道
作 ‘video moire’), 这 horizontal 频率 是
分隔-用-二 为 一个 调制 的 这 horizontal 阶段 通过
pll2. 这 振幅 是 控制 用 寄存器 hmoire.
至 避免 一个 visible 结构 在 screen 这 极性 改变
和 half 这 vertical 频率. 控制 位 mod 使不能运转
这 moire cancellation 函数.
pll2 阶段 探测器
这 pll2 阶段 探测器 是 类似的 至 这 pll1 探测器
和 比较 这 线条 flyback 脉冲波 在 hflb (管脚 1) 和
这 振荡器 sawtooth 电压. 这 控制 电流 是
独立 的 这 horizontal 频率. 这 pll2
探测器 因此 compensates 为 这 延迟 在 这 外部
horizontal deflection 电路 用 调整 这 阶段 的 这
hdrv (管脚 8) 输出 脉冲波.
一个 外部 调制 的 这 PLL2 阶段 是 不 允许,
因为 这个 将 disturb 这 前-纠正 的 这
h-focus parabola.
软 开始 和 备用物品
如果 hpll2 是 牵引的 至 地面, 也 用 一个 外部 直流
电流 或者 用 resetting 这 寄存器 softst, horizontal
输出 脉冲 和 b+ 控制 驱动器 脉冲 是 inhibited.
这个 意思 那 hdrv (管脚 8), bdrv (管脚 6), vout1
(管脚 13) 和 VOUT2 (管脚 12) 是 floating 在 这个 状态. PLL2
和 这 频率-锁 循环 是 无能, CLBL (管脚 16)
提供 一个 持续的 blanking 信号 和 hunlock
(管脚 17) 是 floating.
这个 选项 能 是 使用 为 软 开始, 保护 和
电源-向下 模式. 当 这 hpll2 管脚 是 released
又一次, 一个 自动 软 开始 sequence 在 这 horizontal
驱动 作 好 作 在 这 b
−
驱动 输出 将 是 执行
(看 图.22).
一个 软 开始 能 仅有的 是 执行 如果 这 供应 电压 为
这 ic 是 8.6 v 在 最小.
这 软 开始 定时 是 决定 用 这 过滤 电容 在
HPLL2 (管脚 30), 这个 是 charged 和 一个 常量 电流
在 软 开始. 如果 这 电压 在 管脚 30 (hpll2) reaches
1.1 v, 这 vertical 输出 电流 是 使能. 在 1.8 V 这
horizontal 驱动器 平台 发生 非常 小 输出 脉冲.
这 宽度 的 这些 脉冲 增加 和 这 电压 在
HPLL2 直到 这 最终 职责 循环 是 reached. 这 电压 在
HPLL2 增加 更远 和 执行 一个 软 开始 在 BDRV
(管脚 6) 作 好. 之后 BDRV 有 reached 全部 职责 循环, 这
电压 在 hpll2 持续 至 上升 直到 hpll2 enters 它的
正常的 运行 范围. 这 内部的 承担 电流 是 now
无能. 最终 pll2 和 这 频率-锁 循环 是
使活动. 如果 两个都 功能 reach 正常的 运作,
hunlock (管脚 17) switches 从 这 floating 状态 至
正常的 vertical blanking, 和 持续的 blanking 在 CLBL
(管脚 16) 是 移除.
输出 平台 为 线条 驱动 脉冲 [hdrv (管脚 8)]
一个 打开-集电级 输出 平台 准许 直接 驱动 的 一个
反相的 驱动器 晶体管 因为 的 一个 低 饱和
电压 的 0.3 v 在 20 毫安. 至 保护 这 线条 deflection
晶体管, 这 输出 平台 是 无能 (floating) 为 低
供应 电压 在 v
CC
(看 图.26).
这 职责 循环 的 线条 驱动 脉冲 是 slightly 依赖 在
这 真实的 horizontal 频率. 这个 确保 最佳的
驱动 情况 在 这 全部的 频率 范围.
R
HBUF
R
HREF
R
HBUFpar
×
R
HREF
R
HBUFpar
–
----------------------------------------------
0.8
×
=
805
Ω
=