AD7750
–6– rev. 0
v1 振幅 – mv rms
0.1
0.001
0.01 0.1 1.0 10
0.05
–0.05
–0.1
–0.15
–0.2
0
–0.25
–0.3
错误 – % 的 读
V
DD
= 5v
v2 = 全部 规模
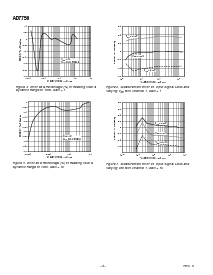
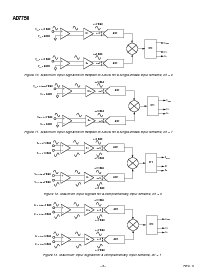
图示 4. 错误 作 一个 percentage (%) 的 读 在 一个
动态 范围 的 1000, 增益 = 1
v1 振幅 – mv rms
0.0001
0.01 0.1
0
0.001
–0.05
–0.1
–0.15
–0.2
–0.25
–0.3
–0.35
–0.4
–0.45
–0.5
错误 – % 的 读
V
DD
= 5v
v2 = 全部 规模
图示 5. 错误 作 一个 percentage (%) 的 读 在 一个
动态 范围 的 1000, 增益 = 16
v1 振幅 – mv rms
0.2
10
0
–0.2
–0.4
0
–0.6
10
1
10
2
10
3
0.4
0.6
错误 – % 的 读
V
DD
= 5.25v
V
DD
= 5.00v
V
DD
= 4.75v
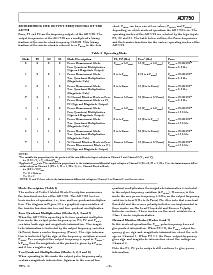
图示 6. 度量 错误 vs. 输入 信号 水平的 和
varying v
DD
和 频道 1, 增益 = 1
v1 振幅 – mv rms
0.2
10
–2
–0.4
–0.6
0
10
–1
10
0
10
2
0.4
0.6
错误 – % 的 读
V
DD
= 5.25v
V
DD
= 5.00v
V
DD
= 4.75v
–0.2
0.8
10
1
图示 7. 度量 错误 vs. 输入 信号 水平的 和
varying v
DD
和 频道 1, 增益 = 16