30 寄存器 描述
(持续)
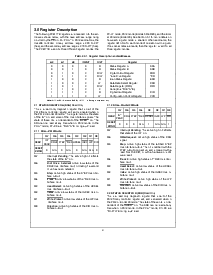
34 驱动 寄存器 (tdr)
ReadWrite
这个 寄存器 是 使用 至 assign 一个 particular 驱动 号码 和
这 录音带 驱动 支持 模式 的 这 数据 separator 所有 其它
logical 驱动 是 assigned floppy 驱动 支持 和 这
数据 separator 任何 future 涉及 至 这 assigned 录音带
驱动 将 invoke 录音带 驱动 support 这 TDR 是 unaffected
用 一个 软件 reset
TDR
D7 D6 D5 D4 D3 D2 D1 D0
DESC
XXXXXX
录音带 录音带
SEL1 SEL0
重置
NA NA NA NA NA NA 0 0
COND
D7–D2 Reserved
这些 位 是 ignored 当 写
至 和 是 触发-状态 当 read
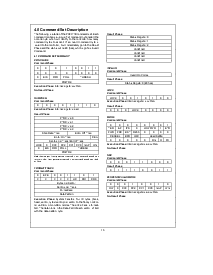
D1–D0 录音带 选择 10
这些 二 位 assign 一个 logical
驱动 号码 至 是 一个 录音带 drive 驱动 0 是 不
有 作 一个 录音带 drive 和 是 保留 作 这
floppy disk 激励 drive 看 表格 3-3 为 这
录音带 驱动 分派 values
表格 3-3 录音带 驱动 分派 值
TAPESEL1 TAPESEL0
驱动
选择
0 0 毫无
011
102
113
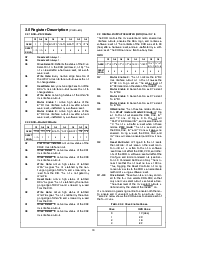
35 主要的 状态 寄存器 (msr)
读 仅有的
这 读 仅有的 主要的 状态 寄存器 indicates 这 电流
状态 的 这 disk controller 这 主要的 状态 寄存器 是
总是 有 至 是 read 一个 的 它的 功能 是 至 控制
这 流动 的 数据 至 和 从 这 数据 寄存器 (先进先出) 这
主要的 状态 寄存器 indicates 当 这 disk 控制 是
准备好 至 send 或者 receive 数据 通过 这 数据 Register 它
应当 是 读 在之前 各自 字节 是 transferred 至 或者 从
这 数据 寄存器 除了 在 一个 DMA transfer 非 延迟 是
必需的 当 读 这个 寄存器 之后 一个 数据 transfer
之后 一个 硬件 或者 软件 reset 或者 恢复 从 一个 pow-
er 向下 state 这 主要的 状态 寄存器 是 立即 avail-
能 至 是 读 用 这
m
P 它 将 包含 一个 值 的 00 十六进制
直到 这 振荡器 电路 有 stabilized 和 这 内部的 reg-
isters 有 被 initialized 当 这 PC8477B 是 准备好 至
receive 一个 新 command 它 将 report 一个 80 十六进制 至 这
m
P
这 系统 软件 能 poll 这 MSR 直到 它 是 ready 这
worst 情况 时间 允许 为 这 MSR 至 report 一个 80 十六进制
值 (rqm 设置) 是 25
m
s 之后 重置 或者 电源 up
MSR
D7 D6 D5 D4 D3 D2 D1 D0
DESC
RQM DIO 非 CMD DRV3 DRV2 DRV1 DRV0
DMA PROG BUSY BUSY BUSY BUSY
重置
00000000
COND
D7 要求 为 Master
Indicates 那 这 控制-
ler 是 准备好 至 send 或者 receive 数据 从 这
m
P
通过 这 FIFO 这个 位 是 cleared 立即的-
ly 之后 一个 字节 转移 和 将 变为 设置
又一次 作 soon 作 这 disk 控制 是 准备好 为
这 next byte 在 一个 非-dma 执行
phase 这 RQM indicates 这 状态 的 这 在-
terrupt pin
D6 数据 IO (方向)
Indicates whether 这
控制 是 expecting 一个 字节 至 是 写 至 (0)
或者 读 从 (1) 这 数据 Register
D5 非-dma Execution
Indicates 那 这 con-
troller 是 在 这 执行 阶段 的 一个 字节 trans-
fer 运作 在 这 非-dma mode 使用 为
多样的 字节 transfers 用 这
m
P 在 这 execu-
tion 阶段 通过 中断 或者 软件 poll-
ing
D4 Command 在 Progress
这个 位 是 设置 之后 这
第一 字节 的 这 Command 阶段 是 written 这个
位 是 cleared 之后 这 last 字节 的 这 结果
阶段 是 read 如果 那里 是 非 结果 阶段 在 一个
command 这 位 是 cleared 之后 这 last 字节
的 这 Command 阶段 是 written
D3 驱动 3 Busy
设置 之后 这 last 字节 的 这
Command 阶段 的 一个 Seek 或者 Recalibrate com-
mand 是 issued 为 驱动 3 Cleared 之后 读
这 第一 字节 在 这 结果 阶段 的 这 Sense
中断 Command 为 这个 drive
D2 驱动 2 Busy
一样 作 在之上 为 驱动 2
D1 驱动 1 Busy
一样 作 在之上 为 驱动 1
D0 驱动 0 Busy
一样 作 在之上 为 驱动 0
36 数据 比率 选择 寄存器 (dsr)
写 仅有的
这个 写 仅有的 寄存器 是 使用 至 程序 这 数据 rate
数量 的 写 precompensation 电源 向下 mode 和
软件 reset 这 数据 比率 是 编写程序 通过 这 CCR
不 这 DSR 为 pc-在 和 PS2 模型 30 和 microchan-
nel applications 其它 产品 能 设置 这 数据 比率 在
这 DSR 这 数据 比率 的 这 floppy 控制 是 deter-
mined 用 这 大多数 recent 写 至 也 这 DSR 或者 CCR
这 DSR 是 unaffected 用 一个 软件 reset 一个 硬件 re-
设置 将 设置 这 DSR 至 02 (十六进制) 这个 corresponds 至 这
default precompensation 设置 和 250 kbs
DSR
D7 D6 D5 D4 D3 D2 D1 D0
DESC
SW 低
0
前- 前- 前-
DRATE1 DRATE0
重置 PWR COMP2 COMP1 COMP0
重置
000000 1 0
COND
D7 软件 Reset
一个 1 在 这个 位 location 将 re-
设置 这 部分 类似的 至 这 DOR 重置 (d2) ex-
cept 那 这个 软件 重置 是 自-clearing
D6 低 Power
一个 1 至 这个 位 将 放 这 控制
在 这 手工的 低 电源 mode 这 oscilla-
tor 和 数据 separator 电路 将 是 转变 off
手工的 低 电源 能 也 是 accessed 通过
这 模式 command 这 碎片 将 来到 输出 的
低 电源 之后 一个 软件 reset 或者 进入 至
这 数据 寄存器 或者 主要的 状态 Register
11