硅 image, 公司
sii 161
一个
SiI
-DS-0009-D
硅 image, 公司
10 主题 至 改变 没有 注意
配置 管脚 描述
管脚 名字 管脚 # 类型 描述
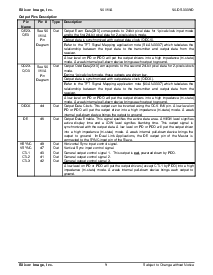
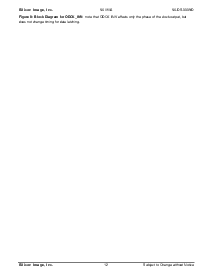
ock_inv 100 在 odck 极性. 一个 低 水平的 选择 正常的 odck 输出. 一个 高 水平的 选择
inverted odck 输出. 所有 其它 输出 signals 是 不 影响 用 这个 管脚. 它们 将
维持 这 一样 定时 非 matter 这 设置 的 ock_inv 管脚 (看 图. 8 在 p.10).
便条 ock_inv 不能 是 设置 高 (inverted) 当 运行 在 双 link 模式
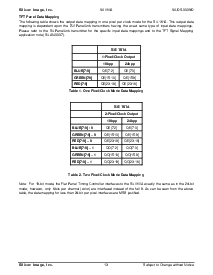
pixs/m_s 4 在 pixel 选择. 一个 低 水平的 indicates 一个 pixel (向上 至 24-位) 每 时钟 模式 使用
qe[23:0]. 一个 高 水平的 indicates 二 pixels (向上 至 48-位) 每 时钟 模式 使用
qe[23:0] 为 第一 pixel 和 qo[23:0] 为 第二 pixel.
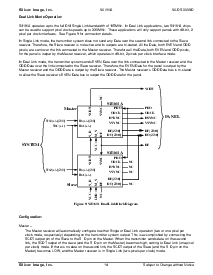
主控/从动装置. 当 s_d 管脚 是 高 (双 link), 这个 管脚 变为 m_s. 当
高, 它 是 在 主控 模式. 当 低, 它 是 在 从动装置 模式. 这 主控 接受者 是 在
一个/二-pixels 每 时钟 模式 取决于 在之上 双/单独的 (s_d) link 运作. 这
从动装置 接受者 是 总是 在 一个-pixel 每 时钟 模式.
stag_输出/
同步
7 在 Staggered 输出. 一个 高 水平的 选择 正常的 同时发生的 输出 在 所有 odd 和
甚至 数据 线条. 一个 低 水平的 选择 staggered 输出 驱动. 这个 函数 是 仅有的
有 在 2-pixels 每 时钟 模式.
同步. 当 s_d 管脚 是 高 (双 link), 这个管脚 是 使用 至 同步
这 从动装置 接受者 至 这 主控 接受者. 这 同步 输入 管脚 的 这 从动装置 接受者 是
连接 至 这 de 输出 管脚 的 这 主控 接受者.
ST 3 在 输出 驱动. 一个 高 水平的 选择 高 输出 驱动 力量. 一个 低 水平的选择
低 输出 驱动 力量.
s_d 1 在 单独的/双 link 模式. 当 高, 它 是 在 双 link 模式. 当 低 它 是 在 单独的
link 模式. 这 从动装置 接受者 是 总是 在 双 link 模式. 这 主控 接受者
switches 在 单独的 和 双 link 模式 depending 在之上 这 scdt 输出 的 这
从动装置 接受者 那 是 连接 至 这 s_d 输入 的 这 主控 接受者.
电源 管理 管脚 描述
管脚
名字
管脚 # 类型 描述
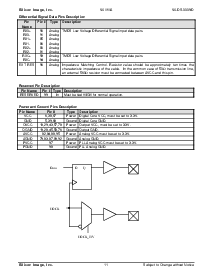
SCDT 8 输出 同步 发现. 一个 高 水平的 是 outputted 当 de 是 actively toggling表明 那 这
link 是 alive. 一个 低 水平的 是 outputted 当 de 是 inactive, 表明 这 link 是 向下.
能 是 连接 至 pdo 至 电源 向下 这 输出 当 de 是 不 发现. 这
scdt 输出 它自己, 不管怎样, 仍然是 在 这 起作用的 模式 在 所有 times.
在 双 link 产品 这 scdt 管脚 的 这 从动装置 接受者 是 连接 至 这 s_d 管脚
的 这 主控 接受者.
PDO 9 在 输出 驱动器 电源 向下 (起作用的 低). 一个 高 水平的 indicates 正常的 运作. 一个
低 水平的 puts 所有 这 输出 驱动器 仅有的(除了 scdt 和 ctl1) 在 一个 高 阻抗
(触发-状态) 模式. 一个 弱 内部的 拉-向下 设备 brings 各自 输出 至 地面. pdo 是 一个
sub-设置 的 这 pd 描述. 这 碎片 是 不 在 电源-向下 模式 和 这个 管脚. scdt
和 ctl1 是 不 触发-陈述 用 this 管脚.
PD 2 在 电源 向下 (起作用的 低). 一个 高 水平的 indicates 正常的 运作. 一个 低 水平的
indicates 电源 向下 模式. 在 电源 向下 模式, 所有 这 输出 驱动器 是 放 在
一个 高 阻抗 (触发-状态) 模式. 一个 弱 内部的 拉-向下 设备 brings 各自 输出 至
地面. additionally, 所有 相似物 逻辑 是 powered 向下, 和 所有 输入 是 无能.