®
9
pcm1760p/u df1760p/u
T
PCF
T
CSV
CAL
SDATA
/pd
T
PSF
T
PDW
T
PCR
描述 名字 最小值 典型值 最大值 单位
脉冲波 宽度 的 /pd 输入 T
PDW
2 – – 1/fclk
延迟 从 /pd 输入 至
cal 输出 T
PCR
– – 6 1/fclk
校准 循环 持续时间 T
PCF
– 4096 – 1/fs
延迟 从 /pd 输入 至 s
数据
LT
PSF
– – 6 1/fclk
延迟 从 completion 的
校准 至 sdata 有效的 T
CSV
– 1 – 1/fs
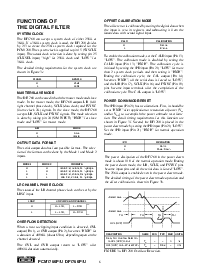
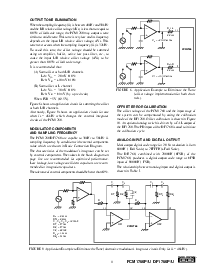
图示 3b. df1760 电源 向下 和 补偿 校准.
系统 时钟: 256fs
描述 名字 最小值 典型值 最大值 单位
低 水平的 持续时间 T
CLKL
31 – – ns
高 水平的 持续时间 T
CLKH
31 – – ns
T
CLKH
T
CLKL
2.0v
1.4v
0.8v
T
LH
T
HL
描述 名字 最小值 典型值 最大值 单位
sclk 频率 F
SLK
32fs 48fs 64fs –
低 持续时间 的 fsclk T
SLKL
100 – – ns
高 持续时间 的 fsclk T
SLKH
100 – – ns
延迟 从 sclk 至 l/r 边缘 T
SLR
–70 – 70 ns
延迟 从 下落 边缘 的
sclk 至 sdata 有效的 T
DSS
––50ns
延迟 从 sclk 至 fsync
边缘 T
SF
–70 – 0 ns
延迟 从 rising 边缘 的
sclk 至 sdata 有效的 T
DSV
100 – – ns
延迟 从 sdata 有效的 至
rising 边缘 的 sclk T
SDR
100 – – ns
SCKL
SDATA
l/r
FSYNC
T
SLR
T
SDR
T
SF
T
DSS
T
DSV
T
SLKH
T
SLKL
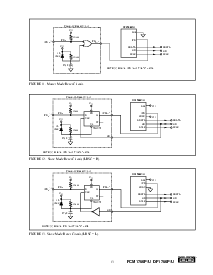
图示 3e. 定时 的 从动装置 模式, df1760.
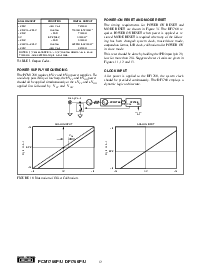
图示 3f. 电源 在 和 模式 重置 定时.
应用 至
描述 名字 最小值 典型值 最大值 单位
(1)
模式
电源 在 至 pd
↑
T
PDW
2 1/fs 主控/从动装置
PD
↑
至 l/r
↑
T
SP
–1 +1 1/fclk 从动装置
(lrsc = “h”)
PD
↑
至 l/r
↓
T
SP
–1 +1 1/fclk 从动装置
(lrsc = “l”)
便条: (1) fs: 抽样 比率. fclk: 系统 时钟 frequency.
T
PDW
T
PDW
T
SP
T
SP
电源
l/r
PD
<lrsc = “h”
T
PDW
T
PDW
T
SP
T
SP
电源
l/r
PD
<lrsc = “l”
系统 时钟: 384fs
描述 名字 最小值 典型值 最大值 单位
低 水平的 持续时间 T
CLKL
24 – – ns
高 水平的 持续时间 T
CLKH
24 – – ns
上升 时间 T
LH
––6ns
下降 时间 T
HL
––6ns
图示 3c. 系统 时钟 定时 (所需的)东西 的 df1760.
T
SDR
T
SF
T
DSS
SCLK
SDATA
l/r
FSYNC
T
SLR
T
DSV
T
DSS
T
DSV
T
SF
描述 名字 最小值 典型值 最大值 单位
sclk 频率 F
SLK
– 64fs –
sclk 频率 职责 循环 – 50 – %
fsync 频率 F
同步
– 2fs –
fsync 频率 职责 循环 – 50 – %
延迟 从 sclk 至 l/r 边缘 T
SLR
–20 – 50 ns
延迟 从 下落 边缘 的
sclk 至 sdata 有效的 T
DSS
––50ns
延迟 从 sclk 至 fsync
边缘 T
SF
–20 – 50 ns
延迟 从 rising 边缘 的
sclk 至 sdata 有效的 T
SDR
100 – – ns
延迟 从 sdata 有效的 至
rising 边缘 的 sclk T
DSV
100 – – ns
图示 3d. 输出 定时 的 主控 模式, df1760.