7
UC1625
UC2625
UC3625
S
开始
clamps 这 输出 的 这 错误 放大器, 不 al
-
lowing 这 错误 放大器 输出 电压 至 超过
S
开始
regardless 的 输入. 这 ramp 在 rc-osc 能
是 应用 至 PWM 在 和 对照的 至 e/一个 输出. 和
S
开始
释放 在下 0.2v 和 这 ramp 最小
正在 大概 1.0v, 这 PWM 比较器 将
保持 这 PWM 获得 cleared 和 这 输出 止. 作
S
开始
rises, 这 PWM 比较器 将 begin 至
职责-循环 modulate 这 PWM 获得 直到 这 错误 放大器
-
fier 输入 克服 这 clamp. 这个 提供 为 一个 safe
和 orderly 发动机 开始-向上 从 一个 止 或者 故障 情况.
tach-输出:
任何 改变 在 这 h1, h2, 或者 H3 输入 负载
数据 从 这些 输入 在 这 位置 传感器 latches.
在 这 一样 时间 数据 是 承载, 一个 fixed-宽度 5V 脉冲波
是 triggered 在 tach-输出. 这 平均 值 的 这 volt
-
age 在 tach-输出 是 直接地 均衡的 至 速, 所以
这个 输出 能 是 使用 作 一个 真实 tachometer 为 速
反馈 和 一个 外部 过滤 或者 averaging 电路
这个 通常地 组成 的 一个 电阻 和 电容.
Whenever tach-输出 是 高, 这 位置 latches 是 在-
hibited, 此类 那 在 这 noisiest 部分 的 这 commu-
tation 循环, 额外的 commutations 是 不 可能.
虽然 这个 将 effectively 设置 一个 最大 轮流的
速, 这 最大 速 能 是 设置 在之上 这 高
-
est 预期的 速, 阻止 false commutation 和
chatter.
V
CC
:
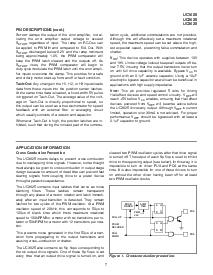
这个 设备 运作 和 供应 在 10V
和 18v. 下面-电压 lockout keeps 所有 输出 止 是
-
低 7.5v, insuring 那 这 输出 晶体管 从不 转变
在 直到 全部 驱动 能力 是 有. 绕过 V
CC
至
地面 和 一个 0.1
µ
F 陶瓷的 电容. 使用 一个 10
µ
F
electrolytic 绕过 电容 作 好 能 是 beneficial 在
产品 和 高 供应 阻抗.
V
REF
:
这个 管脚 提供 管制 5 伏特 为 驱动
通道-效应 设备 和 速 控制 电路系统. V
REF
将
reach +5V 在之前 V
CC
使能, ensuring 那 通道-效应
设备 powered 从 V
REF
将 变为 起作用的 在之前
这 UC3625 驱动 任何 输出. 虽然 V
REF
是 电流
限制, 运作 在 30mA 是 不 advised. 为 恰当的
效能 V
REF
应当 是 绕过 和 在 least 一个
0.1
µ
f 电容 至 地面.
管脚 描述 (内容.)
交叉 传导 prevention
这 UC3625 inserts 延迟 至 阻止 交叉 传导
预定的 至 overlapping 驱动 信号. 不管怎样, 一些 想法
必须 总是 是 给 至 交叉 传导 在 输出 平台
设计 因为 非 数量 的 dead 时间 能 阻止 快
slewing 信号 从 连接 驱动 至 一个 电源 设备
通过 一个 parasitic 电容.
这 UC3625 包含 输入 latches 那 提供 作 噪音
blanking 过滤. 这些 latches 仍然是 transparent
通过 任何 阶段 的 一个 发动机 旋转 和 获得 immedi
-
ately 之后 一个 输入 转变 是 发现. 它们 仍然是
latched 为 二 循环 的 这 PWM 振荡器. 在 一个 PWM
振荡器 速 的 20khz, 这个 corresponds 至 50
µ
sto
100
µ
s 的 blank 时间 这个 限制 最大 轮流的
速 至 100kRPM 为 一个 发动机 和 六 transitions 每 ro
-
tation 或者 50kRPM 为 一个 发动机 和 12 transitions 每 rota
-
tion.
这个 阻止 噪音 发生 在 这 第一 50
µ
s 的 一个 tran
-
sition 从 propagating 至 这 输出 晶体管 和
造成 cross–conduction 或者 chatter.
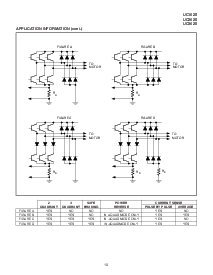
这 UC3625 也 包含 六 flip flops 相应的 至
这 六 输出 驱动 信号. 一个 的 这些 flip flops 是 设置
每 时间 那 一个 输出 驱动 信号 是 转变 在, 和
cleared 二 PWM 振荡器 循环 之后 那 驱动 信号
是 转变 止. 这 输出 的 各自 flip flop 是 使用 至 inhibit
驱动 至 这 opposing 输出 (看 在下). 在 这个 方法, 它 是
impossible 至 转变 在 驱动器 PUA 和 PDA 在 这 一样
时间. 它 是 也 impossible 为 一个 的 这些 驱动器 至 转变
在 没有 这 其它 驱动器 having 被 止 为 在 least
二 pwm 振荡器 clocks.
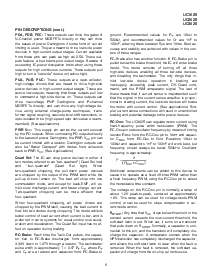
应用 信息
边缘
FINDER
变换
REG
SQ
QR
SQ
QR
PU一个
PDA
拉
向下
拉 向上
从
解码器
PWM
CLK
图示 1. 交叉 传导 prevention.