30 寄存器 描述
(持续)
D5 Undefined
应当 是 设置 至 0
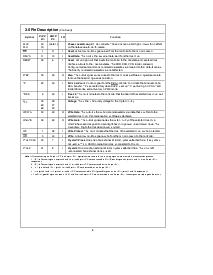
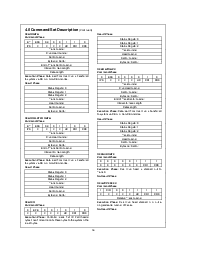
D4–D2 Precompensation Select
这些 三 位 se-
lect 这 数量 的 写 precompensation 这
floppy 控制 将 使用 在 这 WDATA disk
接口 output 表格 3-4 显示 这 数量 的
precompensation 使用 为 各自 位 pattern 在
大多数 cases 这 default 值 (表格 3-5) 能
是 used however alternate 值 能 是 cho-
sen 为 明确的 类型 的 驱动 和 media
追踪 0 是 这 default 开始 追踪 号码 为
precompensation 这 开始 追踪 号码
能 是 changed 在 这 配置 command
D1–D0 数据 比率 选择 10
这些 位 决定 这
数据 比率 为 这 floppy controller 看 表格 3-6
为 这 相应的 数据 比率 为 各自 值
的 D1 D0 这 数据 比率 选择 位 是 unaffect-
ed 用 一个 软件 reset 和 是 设置 至 250 kbs
之后 一个 硬件 reset
表格 3-4 写 Precompensation 延迟
PRECOMP
Precompensation 延迟
432
1 1 1 00 ns
0 0 1 417 ns
0 1 0 833 ns
0 1 1 1250 ns
1 0 0 1667 ns
1 0 1 2083 ns
1 1 0 2500 ns
0 0 0 DEFAULT
表格 3-5 Default Precompensation 延迟
数据 比率 Precompensation 延迟
1 Mbs 417 ns
500 kbs 1250 ns
300 kbs 1250 ns
250 kbs 1250 ns
表格 3-6 数据 比率 选择 Encoding
数据 比率 选择 数据 比率
1 2 MFM FM
1 1 1 Mbs Illegal
0 0 500 kbs 250 kbs
0 1 300 kbs 150 kbs
1 0 250 kbs 125 kbs
Note
FM 模式 是 不 有保证的 通过 函数的 testing
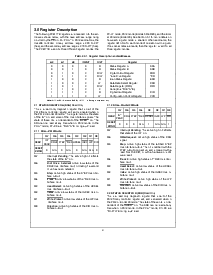
37 数据 寄存器 (先进先出)
ReadWrite
这 先进先出 (readwrite) 是 使用 至 转移 所有 commands
data 和 状态 在 这
m
P 和 这 PC8477B 在
这 Command Phase 这
m
P 写 这 command 字节 在
这 先进先出 之后 polling 这 RQM 和 DIO 位 在 这 MSR
在 这 结果 Phase 这
m
P 读 这 结果 字节 从
这 先进先出 之后 polling 这 RQM 和 DIO 位 在 这 MSR
这 enabling 的 这 先进先出 和 设置 的 这 先进先出 门槛
是 完毕 通过 这 配置 command 如果 这 先进先出 是 enabled
仅有的 这 执行 阶段 字节 transfers 使用 这 16 字节
FIFO 这 先进先出 是 总是 无能 在 这 Command
和 结果 阶段 的 一个 控制 operation 如果 这 先进先出 是
enabled 它 将 不 是 无能 之后 一个 软件 重置 如果 这
锁 位 是 设置 在 这 锁 Command 之后 一个 硬件
reset 这 先进先出 是 无能 至 维持 兼容性 和 pc-
在 systems
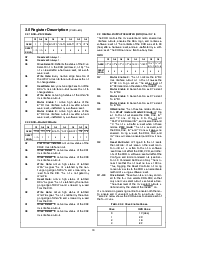
这 16 字节 先进先出 能 是 使用 为 DMA Interrupt 或者 软-
ware polling 类型 transfers 在 这 执行 的 一个 read
write format 或者 scan command 在 addition 这 先进先出 能
是 放 在 一个 Burst 或者 非-burst 模式 和 这 模式 com-
mand 在 这 Burst mode DRQ 或者 INT 仍然是 起作用的 直到
所有 的 这 字节 有 被 transferred 至 或者 从 这 FIFO 在
这 非-burst mode DRQ 或者 INT 是 deasserted 为 350 ns
至 准许 高等级的 priority 转移 requests 至 是 serviced 这
模式 command 能 也 使不能运转 这 先进先出 为 也 读
或者 写 separately 这 先进先出 准许 这 系统 一个 大
latency 没有 造成 一个 disk overrununderrun error typi-
cal 使用 的 这 先进先出 将 是 在 这 1 Mbs 数据 rate 或者
和 multi-tasking 运行 systems 这 default 状态 的
这 先进先出 是 disabled 和 一个 门槛 的 zero 这 default
状态 是 entered 之后 一个 硬件 reset
数据 寄存器 (先进先出)
D7 D6 D5 D4 D3 D2 D1 D0
DESC
数据
70
重置
字节 模式
COND
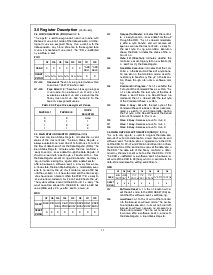
在 这 执行 阶段 的 一个 command involving 数据
转移 tofrom 这 FIFO 这 系统 必须 respond 至 一个
数据 转移 维护 要求 为基础 在 这 下列的 formu-
la
最大 容许的 数据 转移 维护 时间
(thresh
一个
1)
c
8
c
t
DRP
b
(16
c
t
ICP
)
这个 formula 是 好的 为 所有 数据 比率 和 这 先进先出 使能
或者 disabled THRESH 是 一个 四 位 值 编写程序 在 这
配置 command 这个 sets 这 先进先出 threshold 如果 这
先进先出 是 disabled THRESH 是 零 在 这 在之上 formula 这
last 期 的 这 formula (16
c
t
ICP
) 是 一个 固有的 延迟 预定的
至 这 microcode overhead 必需的 用 这 PC8477B 这个
延迟 是 也 数据 比率 dependent 看 表格 6-1 为 这
t
DRP
和 t
ICP
times
这 可编程序的 先进先出 门槛 (thresh) 是 有用的 在
调整 这 floppy 控制 至 这 速 的 这 system 在
其它 words 一个 慢 系统 和 一个 sluggish DMA 转移
能力 将 使用 一个 高 值 的 THRESH 给 这
系统 更多 时间 至 respond 至 一个 数据 转移 维护 re-
quest (drq 为 DMA 模式 或者 INT 为 中断 模式) con-
versely 一个 快 系统 和 快 回馈 至 一个 数据 转移
维护 要求 将 使用 一个 低 值 的 THRESH
38 数字的 输入 寄存器 (dir)
读 仅有的
这个 diagnostic 寄存器 是 使用 至 发现 这 状态 的 这
DSKCHG disk 接口 输入 和 一些 diagnostic signals
这 函数 的 这个 寄存器 取决于 在 这 寄存器 模式
的 operation 当 在 这 pc-在 mode 这 D6–D0 是
触发-状态 至 避免 conflict 和 这 fixed disk 状态 regis-
ter 在 这 一样 address 这 DIR 是 unaffected 用 一个 软-
ware reset
12