 |
|
|||
| 您现在的位置:首页 > IC英文资料库 | 进入手机版 |
|
|
||||||||||||||||||||||||||||||||||
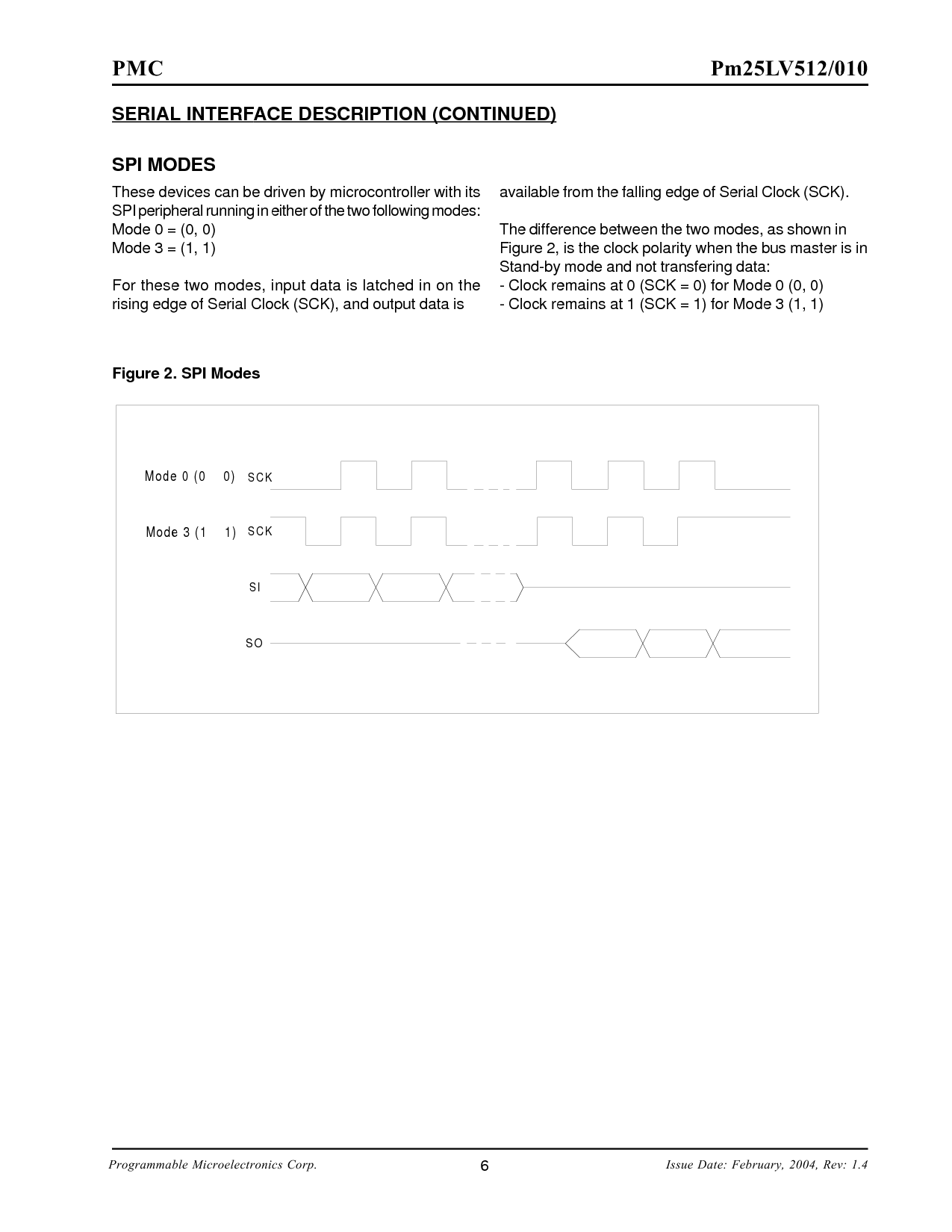 |
|||||||||||||||||||||||||||||||||||
| 资料评论区: |
| 点击 | 回复 | 标题 | 作者 | 最后回复时间 |
| 关于我们 | 联系我们 |
| 电 话:13410210660 QQ : 84325569
|
||
| 联系方式: E-mail:CaiZH01@163.com | ||
| |
|
|||
| 您现在的位置:首页 > IC英文资料库 | 进入手机版 |
|
|
||||||||||||||||||||||||||||||||||
|
|
|||||||||||||||||||||||||||||||||||
| 资料评论区: |
| 点击 | 回复 | 标题 | 作者 | 最后回复时间 |
| 关于我们 | 联系我们 |
| 电 话:13410210660 QQ : 84325569
|
||
| 联系方式: E-mail:CaiZH01@163.com | ||