飞利浦 半导体
lpc2212/lpc2214
16/32-位 arm 微控制器 和 外部 记忆 接口
产品 数据 rev. 02 — 23 12月 2004 5 的 40
9397 750 13149
© koninklijke 飞利浦 electronics n.v. 2004. 所有 权利 保留.
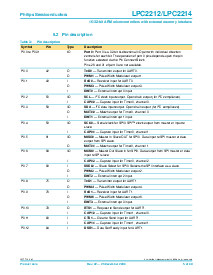
5.2 管脚 描述
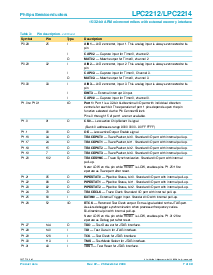
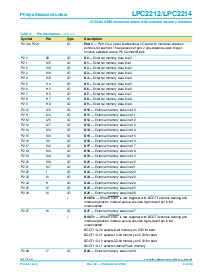
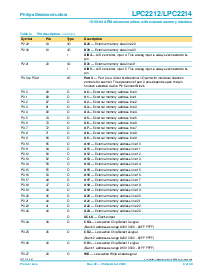
表格 3: 管脚 描述
标识 管脚 类型 描述
p0.0 至 p0.31 i/o
端口 0:
端口 0 是 一个 32-位 bi-directional i/o 端口 和 单独的 方向
控制 为 各自 位. 这 运作 的 端口 0 管脚 取决于 在之上 这 管脚
函数 选择 通过 这 管脚 连接 块.
管脚 26 和 31 的 端口 0 是 不 有.
p0.0 42 O
txd0 —
传输者 输出 为 uart0.
O
pwm1 —
脉冲波 宽度 modulator 输出 1.
p0.1 49 I
rxd0 —
接受者 输入 为 uart0.
O
pwm3 —
脉冲波 宽度 modulator 输出 3.
I
eint0 —
外部 中断 0 输入
p0.2 50 i/o
scl —
I
2
c 时钟 输入/输出. 打开 流 输出 (为 i
2
c 遵从).
I
cap0.0 —
俘获 输入 为 timer0, 频道 0.
p0.3 58 i/o
sda —
I
2
c 数据 输入/输出. 打开 流 输出 (为 i
2
c 遵从).
O
mat0.0 —
相一致 输出 为 timer0, 频道 0.
I
eint1 —
外部 中断 1 输入.
p0.4 59 i/o
sck0 —
串行 时钟 为 spi0. spi™ 时钟 输出 从 主控 或者 输入 至
从动装置.
I
cap0.1 —
俘获 输入 为 timer0, 频道 1.
p0.5 61 i/o
miso0 —
主控 在 从动装置 输出 为 spi0. 数据 输入 至 spi 主控 或者 数据
输出 从 spi 从动装置.
O
mat0.1 —
相一致 输出 为 timer0, 频道 1.
p0.6 68 i/o
mosi0 —
主控 输出 从动装置 在 为 spi0. 数据 输出 从 SPI 主控 或者 数据
输入 至 spi 从动装置.
I
cap0.2 —
俘获 输入 为 timer0, 频道 2.
p0.7 69 I
ssel0 —
从动装置 选择 为 spi0. 选择 这 spi 接口 作 一个 从动装置.
O
pwm2 —
脉冲波 宽度 modulator 输出 2.
I
eint2 —
外部 中断 2 输入.
p0.8 75 O
txd1 —
传输者 输出 为 uart1.
O
pwm4 —
脉冲波 宽度 modulator 输出 4.
p0.9 76 I
rxd1 —
接受者 输入 为 uart1.
O
pwm6 —
脉冲波 宽度 modulator 输出 6.
I
eint3 —
外部 中断 3 输入.
p0.10 78 O
rts1 —
要求 至 send 输出 为 uart1.
I
cap1.0 —
俘获 输入 为 timer1, 频道 0.
p0.11 83 I
cts1 —
clear 至 send 输入 为 uart1.
I
cap1.1 —
俘获 输入 为 timer1, 频道 1.
p0.12 84 I
dsr1 —
数据 设置 准备好 输入 为 uart1.