MT9042C
进步 信息
10
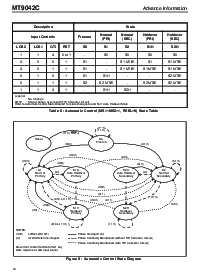
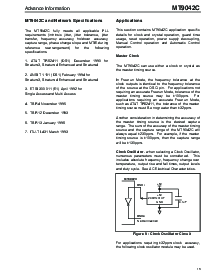
图示 8 - 自动 控制 状态 图解
描述 状态
输入 控制 Freerun
正常的
(pri)
正常的
(秒)
Holdover
(pri)
Holdover
(秒)
LOS2 LOS1 GTi RST S0 S1 S2 S1H S2H
1 1 X 0 至 1 - S0 S0 S0 S0
X 0 0 1 S1 - s1 mtie S1 s1 mtie
X 0 1 1 S1 - s1 mtie s1 mtie s1 mtie
0 1 0 1 S1 S1H - - s2 mtie
0 1 1 1 S2 s2 mtie - s2 mtie s2 mtie
1 1 X 1 - S1H S2H - -
legend:
- 非 改变
mtie 状态 改变 occurs 和 系 corrector 电路
谈及 至 自动 控制 状态 图解 为 状态 改变 至 和 从 自动-holdover 状态
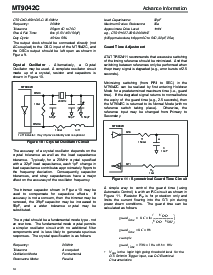
表格 5 - 自动 控制 (ms1=ms2=1, rsel=0) 状态 表格
(01x)
(x0x)
(01x)
(x0x)
{A}
(11x)
(011)
(11x)
(011)
(x0x)
(11x)
(01x)
(01x)
(010 或者 11x)
(x0x)
(x0x)
(01x)
(x01)
重置
{A}
S0
Freerun
S2H
Holdover
Secondary
S1H
Holdover
Primary
S2
正常的
Secondary
S1
正常的
Primary
(x00)
S1A
自动-holdover
Primary
S2A
自动-holdover
Secondary
(010 或者 11x)
(11x) RST=1
(x0x)
注释:
(xxx) los2 los1 gti
{A} invalid 涉及 信号
movement 至 正常的 状态 从 任何
状态 需要 一个 有效的 输入 信号
阶段 re-排成直线
阶段 continuity maintained (没有 系 corrector 电路)
阶段 continuity maintained (和 系 corrector 电路)