进步 信息
MT9042C
7
dpll 和 这 守卫 时间 电路. 控制 是 为基础
在 这 逻辑 水平 在 这 控制 输入 los1, los2,
rsel, ms1, ms2 和 gti 的 这 守卫 时间 电路
(看 图示 6).
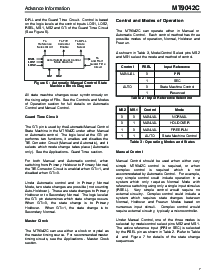
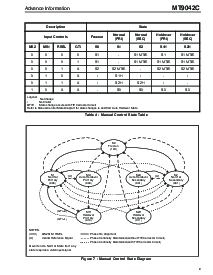
图示 6 - 自动/手工的 控制 状态
机器 块 图解
所有 状态 机器 改变 出现 synchronously 在
这 rising 边缘 的 f8o. 看 这 控制 和 模式
的 运作 部分 为 全部 详细信息 在 自动
控制 和 手工的 控制.
守卫 时间 电路
这 gti 管脚 是 使用 用 这 自动/手工的 控制
状态 机器 在 这 mt9042c 下面 也 手工的
或者 自动 控制. 这 逻辑 水平的 在 这 gti 管脚
执行 二 功能, 它 使能 和 使不能运转 这
系 corrector 电路 (手工的 和 自动), 和 它
选择 这个 模式 改变 takes 放置 (自动
仅有的). 看 这 产品 - 守卫 时间 部分.
为 两个都 手工的 和 自动 控制, 当
切换 从 primary holdover 至 primary 正常的,
这 系 corrector 电路 是 使能 当 gti=1, 和
无能 当 gti=0.
下面 自动 控制 和 在 primary 正常的
模式, 二 状态 改变 是 可能 (不 counting
自动-holdover). 这些 是 状态 改变 至 primary
holdover 或者 至 secondary 正常的. 这 逻辑 水平的 在
这 gti 管脚 确定 这个 状态 改变 occurs.
当 gti=0, 这 状态 改变 是 至 primary
holdover. 当 gti=1, 这 状态 改变 是 至
secondary 正常的.
主控 时钟
这 mt9042c 能 使用 也 一个 时钟 或者 结晶 作
这 主控 定时 源. 为 推荐 主控
定时 电路, 看 这 产品 - 主控 时钟
部分.
控制 和 模式 的 运作
这 mt9042c 能 运作 也 在 手工的 或者
自动 控制. 各自 控制 方法 有 三
可能 模式 的 运作, 正常的, holdover 和
freerun.
作 显示 在 表格 3, 模式/控制 选择 管脚 ms2
和 ms1 选择 这 模式 和 方法 的 控制.
手工的 控制
手工的 控制 应当 是 使用 当 也 非常
简单的 mt9042c 控制 是 必需的, 或者 当
complex 控制 是 必需的 这个 是 不
accommodated 用 自动 控制. 为 例子,
非常 简单的 控制 可以 包含 运作 在 一个
系统 这个 仅有的 需要 正常的 模式 和
涉及 切换 使用 仅有的 一个 单独的 输入 stimulus
(rsel). 非常 简单的 控制 将 需要 非
外部 电路系统. complex 控制 可以 包含 一个
系统 这个 需要 状态 改变 在
正常的, holdover 和 freerun 模式 为基础 在
numerous 输入 stimuli. complex 控制 将
需要 外部 电路系统, 典型地 一个 微控制器.
下面 手工的 控制, 一个 的 这 三 模式 是
选择 用 模式/控制 选择 管脚 ms2 和 ms1.
这 起作用的 涉及 输入 (pri 或者 秒) 是 选择
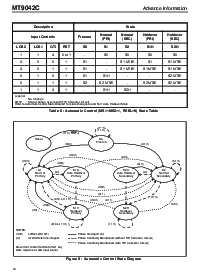
用 这 rsel 管脚 作 显示 在 表格 2. 谈及 至 表格
4 和 图示 7 为 详细信息 的 这 状态 改变
sequences.
MS1
MS2
至
和 从
守卫 时间
电路
至
涉及
选择 mux
至 系
Corrector
使能
自动/手工的 控制
状态 机器
至 dpll
状态
选择
RSEL
LOS1
LOS2
控制 RSEL 输入 涉及
手工的 0 PRI
1 秒
自动 0 状态 机器 控制
1 保留
表格 2 - 输入 涉及 选择
MS2 MS1 控制 模式
0 0 手工的 正常的
0 1 手工的 HOLDOVER
1 0 手工的 FREERUN
1 1 自动 状态 机器 控制
表格 3 - 运行 模式 和 states