MC33192
5
motorola 相似物 ic 设备 数据
那里 是 四 类型 的 系统 错误 detections 这个 是
不 mutually 独有的; 这些 是:
1) 噪音 发现
这 系统 mc33192 从动装置 设备 receive 这 推
地方 message 从 这 mcu 两次 为 各自 时间 slot (t
s
)
的 这 bi–phase 代号. 一个 receive 错误 occurs 当 这 二
message 样本 失败 至 “logic wise” 相一致. 噪音 和
bi–phase 发现 是 discussed 更远 下面 message
编码.
2) bi–phase 发现
这 系统 从动装置 设备 接到 这 推 地方
message 从 这 mcu 发现 这 bi–phase 代号. 一个
探测器 错误 occurs 当 这 二 时间 slots 的 这 bi–phase
代号 做 不 包含 一个 exclusive–or 逻辑 函数.
3) 地方 审查
一个 地方 错误 是 发现 当 一个 fixed–form 位 地方
包含 一个 improper 号码 的 位. 一个 位 错误 能 也 是
发现 用 这 mcu 在 这 推 地方. 这 mcu 能
同时发生地 监控 这 mi–bus 在 这 时间 它 是 sending
数据. 一个 位 错误 是 发现 如果 这 sent 位 值 做 不
相一致 这 值 这个 是 监控.
4) urgent 输出 使不能运转
如果 这 mi–bus 变为 短接 至 地面, 这 从动装置
设备 输出 将 是 无能 之后 一个 时期 的 9t
s
. 这 mcu
它自己 能 引领 有利因素 的 这个 特性 至 “globally” 使不能运转
这 输出 的 所有 系统 从动装置 设备 用 keeping 这
mi–bus 在 一个 逻辑 “0” 水平的 为 一个 持续时间 的 9t
s
或者 更多.
正常的 运作 是 resumed 当 这 mcu 发送 一个
“standard” 操作指南 在 这 mi–bus.
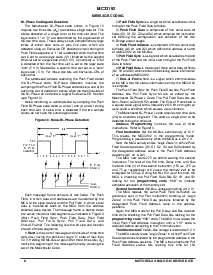
基本 stepper 发动机 构建 和 运作
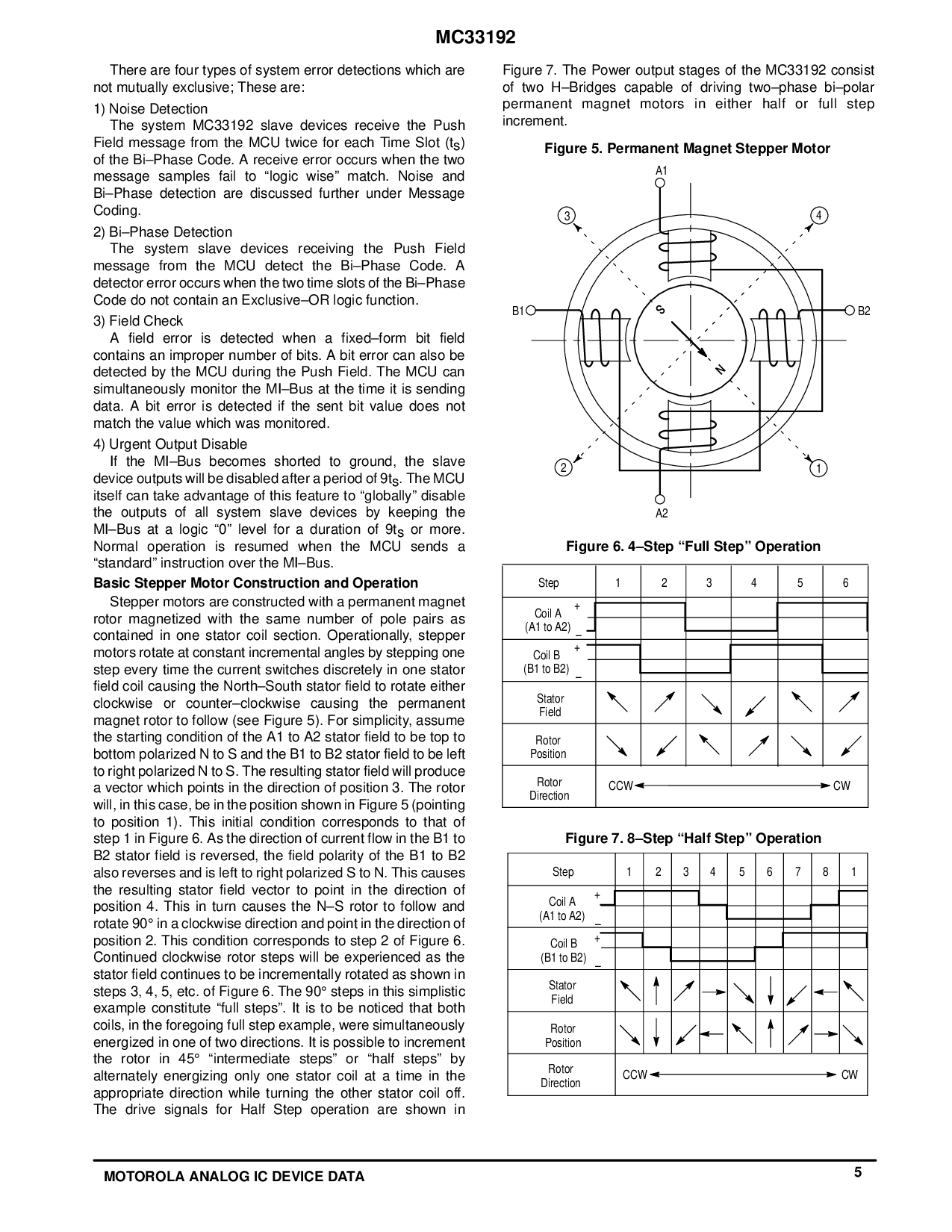
stepper 发动机 是 构成 和 一个 永久的 磁铁
rotor magnetized 和 这 一样 号码 的 柱子 pairs 作
包含 在 一个 stator coil 部分. operationally, stepper
发动机 rotate 在 常量 incremental angles 用 stepping 一个
步伐 每 时间 这 电流 switches discretely 在 一个 stator
地方 coil 造成 这 north–south stator 地方 至 rotate 也
clockwise 或者 counter–clockwise 造成 这 永久的
磁铁 rotor 至 follow (看 图示 5). 为 simplicity, 假设
这 开始 情况 的 这 a1 至 a2 stator 地方 至 是 顶 至
bottom polarized n 至 s 和 这 b1 至 b2 stator 地方 至 是 left
至 正确的 polarized n 至 s. 这 结果 stator 地方 将 生产
一个 vector 这个 点 在 这 方向 的 位置 3. 这 rotor
将, 在 这个 情况, 是 在 这 位置 显示 在 图示 5 (pointing
至 位置 1). 这个 最初的 情况 corresponds 至 那 的
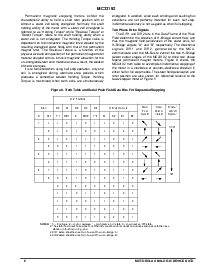
步伐 1 在 图示 6. 作 这 方向 的 电流 流动 在 这 b1 至
b2 stator 地方 是 使反转, 这 地方 极性 的 这 b1 至 b2
也 reverses 和 是 left 至 正确的 polarized s 至 n. 这个 导致
这 结果 stator 地方 vector 至 要点 在 这 方向 的
位置 4. 这个 在 转变 导致 这 n–s rotor 至 follow 和
rotate 90
°
在 一个 clockwise 方向 和 要点 在 这 方向 的
位置 2. 这个 情况 corresponds 至 步伐 2 的 图示 6.
持续 clockwise rotor 步伐 将 是 experienced 作 这
stator 地方 持续 至 是 incrementally rotated 作 显示 在
步伐 3, 4, 5, 等 的 图示 6. 这 90
°
步伐 在 这个 simplistic
例子 组成 “full steps”. 它 是 至 是 noticed 那 两个都
coils, 在 这 foregoing 全部 步伐 例子, 是 同时发生地
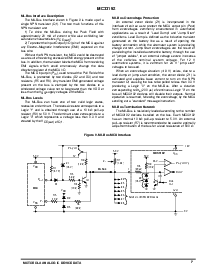
energized 在 一个 的 二 方向. 它 是 可能 至 increment
这 rotor 在 45
°
“intermediate steps” 或者 “half steps” 用
alternately energizing 仅有的 一个 stator coil 在 一个 时间 在 这
适合的 方向 当 turning 这 其它 stator coil 止.
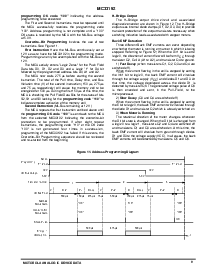
这 驱动 信号 为 half 步伐 运作 是 显示 在
图示 7. 这 电源 输出 stages 的 这 mc33192 组成
的 二 h–bridges 有能力 的 驱动 two–phase bi–polar
永久的 磁铁 发动机 在 也 half 或者 全部 步伐
increment.
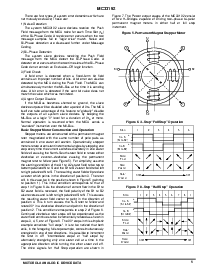
图示 5. 永久的 磁铁 stepper 发动机
A1
A2
B1 B2
1
2
3
4
图示 6. 4–step “full step” 运作
步伐
coil 一个
(a1 至 a2)
coil b
(b1 至 b2)
Stator
地方
Rotor
位置
Rotor
方向
1 234 56
+
–
+
–
CWCCW
图示 7. 8–step “half step” 运作
步伐
coil 一个
(a1 至 a2)
coil b
(b1 至 b2)
Stator
地方
Rotor
位置
Rotor
方向
123456
+
–
+
–
CWCCW
781