发动机 速 控制
m51971l/fp
mitsubishi <控制 / 驱动器 ic>
4. Necessity 为 稳固的 控制
稳固的 控制 需要 这 增益 的 g
C
(s)
•
G
M
(s) 至 是 这 阶段
特性 的 180˚ 或者 较少 在 一个 频率 范围 的 1 或者 更多.
这 relation 的 这 阶段 和 这 增益 是 决定 符合 至
这 波特’s theorem 当 所有 柱子 和 零 点 的 这 转移
函数 是 放置 在 这 left 一侧 的 这 complex sphere.
如果 g
C
(j
ω
)
•
G
M
(j
ω
) 跟随 这 波特’s theorem, 在 一个 频率 范围
的 | g
C
(j
ω
)
•
G
M
(j
ω
) |
≥
1 这 inclination 的 增益 的 g
C
(j
ω
)
•
G
M
(j
ω
)
必须 是 -12db/oct 或者 更多 为 稳固的 控制.
为 这 reason 在之上, 当 这 电路 常量 是 选择 至
达到
ω
F1
≈ω
M
, 和 这 inclination 的 这 增益 的 各自 的 g
C
(j
ω
)
和 g
M
(j
ω
)是 -6db/oct, 那 是, 这 下列的 formula 必须 是
established和 遵守 至 这frequency 的
ω
F2
在哪里 这
inclination 的 这 增益 的 g
C
(j
ω
)
•
G
M
(j
ω
) begins 至 是 -12db/oct.
| g
C
(j
ω
F2
)
•
G
M
(j
ω
F2
)
| < 1
• • • • • • • • • • • • • • • • • • • • • • • • • • • • •
(8)
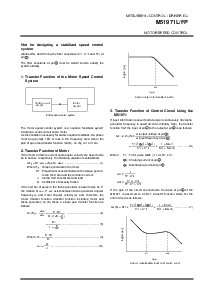
至 制造 一个 准确的 控制, 这 增益 的 打开-循环 转移 函数
必须 是 大 在 这 全部 范围 的 频率.
这 变化 的 这 发动机 rotating 速attenuates预定的 至
disturbance 在 一个 inclination 的 -6db/oct 和 这 频率 的
ω
M
或者 更多.
这 能力 的 rotating 速 控制 在 这 频率 范围 从
ω
F1
至
ω
F2
是 决定 用 这 增益 的 打开-循环 转移 函数
在
ω
F1
(
≈ω
M
). 这 下列的 formula 是 established 和
| g
C
(j
ω
F2
)
•
G
M
(j
ω
F2
)
| < 1 和 当 这 inclination 的 这 增益 的
G
C
(j
ω
)
•
G
M
(j
ω
)
是 almost equal 至 -6db/oct 和 这 频率 的
ω
F2
或者 较少.
改进 的 控制 精确 在 这 频率 范围 从
ω
F1
至
ω
F2
需要 这 下列的 情况.
ω
F1
≈ω
M
• • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • •
(10)
这 k
CP
或者 c
F1
+C
F2
值 必须 是 设置 至 satisfy formulae (4) 和
(5).
5. 影响 在 这 稳固 的 tacho-发生器
频率
这 控制 系统 那 是 控制 和 tacho-发生器frequ-
ency, i.e. 时期, 是 一个 kind 的 样本 支撑 系统 控制和
分离的 信息 在 这 时间 axis.
增加 的 extra 阶段 延迟 至 样本 支撑 运作 制造 这
系统 更多 unstable.
更多 准确的 转移 函数 h*(
j
ω
) (g
C
*(
j
ω
)
•
G
M
*(
j
ω
)) 带去 这
在之上 运作 在 账户 是 作 跟随, 当 h(
j
ω
)(g
C
(
j
ω
)
•
G
M
(
j
ω
)) 是 assumed 至 是 这 转移 函数 在哪里 这个opera-
tion 是 不 带去 在 账户:
在哪里:
ω
G
: 设置 值 的 tacho-发生器 频率
那 是, extra 阶段 延迟 的 2
πω
/
ω
G
(radian) 必须 是 带去 在
账户.
那 是, 如果 这 angular 频率 satisfying | g
C
*(
j
ω
)
•
G
M
*(
j
ω
)
| = 1
是 assumed 至 是
ω
od
B
, 这 下列的 relation 必须 是 established.
ω
G
> 4
•
ω
od
B
• • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • •
(13)
当 这个 确定
ω
G
, 这 可能 增益 的 打开-循环 转移
函数 和
ω
M
能 是 得到.
这个 formula (14) 必须 是 satisfied 在 这 控制 系统 使用 这
频率 的 这 tacho-发生器 regardless 的 这 控制 系统
和 indicates 那 这 upper 限制 值 的 这 控制 增益 和
ω
M
是 inevitably 决定 当 这 发动机 和 tacho-发生器 是
决定.
改进 的 这 控制 精确 在 这 rotating 速 需要
| gc(
j
ω
M
)
•
G
M
(
j
ω
M
)
| >> 1. 这 下列的 formula 必须 是 那里-
fore established.
6. Conclusion
符合 至 这 theoretical 仔细考虑 在之上, 这 设计 的
速 控制 系统 制造 这 最好的 使用 的 这 特性 的
这 发动机 是 描述 作 跟随:
如果
ω
M
sharply 改变 和 发动机 加载 changed, 一个 电路 常量
是 desirable 至 是 设置 周围 最小
ω
M
.
作 c
F1
是 小, 影响 用
ω
F2
变为 小, 但是 这
顶峰-至-顶峰 值 的 这 输出 管脚 波形 变为 大 和
这 驱动 波形 变为 closer 至 脉冲波 shape.
在 大多数 的 设计 具体情况, 两个都 sides 是 因此 desirable 至 是
equal.
(3) 选择 的 增益 常量
keeping 这relation satisfying formulae (16) 和(17)在之上,
获得 一个 值 为 稳固的 控制 用 changing 这 k
CP
或者 c
F1
+C
F2
值.
如果 这 发动机 设置 速 是 分隔 在 一些 stages, 平台 的 更小的
速 是 较少 稳固的. 在 这个 情况, experiment 必须 是 制造 在
更小的 speeds.
| g
C
(j
ω
M
)
•
G
M
(j
ω
M
)
| <
ω
F1
ω
F2
≈
ω
M
ω
F2
• • • • • • • • • • • • • • • • • • • • • •
(9)
ω
F1
ω
F2
>>
• • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • •
(11)
1
h*(
j
ω
)=
π
(
ω
/
ω
G
)
si
n
π
(
ω
/
ω
G
)
e
–j
ω
G
2
πω
∞
Σ
h(
j
ω
+ jn
ω
G
)
n=–
∞
• • • • • • • • • • • • • •
(12)
| g
C
(
j
ω
M
)
•
G
M
(
j
ω
M
)
| < 0.357 x
ω
M
ω
G
• • • • • • • • • • • • • • • • • • • •
(14)
0.357
•
ω
M
ω
G
• • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • •
(15)
>> 1
(1)
ω
F1
≡
R
F
•
C
F2
1
• • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • •
(16)
≈
ω
M
(2)
ω
F2
≡
R
F
•
C
f1 •
C
F2
C
F1
+C
F2
• • • • • • • • • • • • • • • • • • • • • •
(17)
ω
G
≥
4
1