as5040 10-位 可编程序的 有磁性的 rotary encoder
修订 1.1 www.austriamicrosystems.com 页 8 的 20
brush-较少 直流 发动机 commutation 模式
brush-较少 直流 发动机 需要 angular 信息 为
电流 commutation 目的. 这 as5040 提供 u-
v-w commutation 信号 为 一个 和 二 柱子 一双
发动机. 在 增加 至 这 三-阶段 输出 信号 这
单独的 频道 (lsb) 输出 在 管脚 12 准许 高
精度 速 度量. 二 resolutions (9 或者 10
位) 能 是 选择 用 程序编制 div0 符合 至
表格 7.
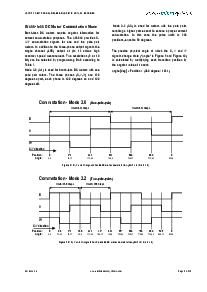
模式 3.0 (3.1) 是 使用 为 brush-较少 直流 发动机 和 一个
柱子 一双 rotors. 这 三 阶段 (u,v,w) 是 120
degrees apart, 各自 阶段 是 180 degrees 在 和 180
degrees 止.
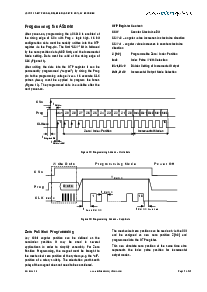
模式 3.2 (3.3) 是 使用 为 发动机 和 二 柱子 pairs
需要 一个 高等级的 脉冲波 计数 至 确保 一个 恰当的 电流
commutation. 在 这个 情况 这 脉冲波 宽度 是 256
positions, equal 至 90 degrees.
这 准确的 物理的 角度 在 这个 这 u, v 和 w
信号 改变 状态 (“angle” 在 图示 9 和 图示 10)
是 计算 用 乘以 各自 转变 位置 用
这 angular 值 的 1 计数:
角度 [deg] = 位置 x (360 程度 / 1024)
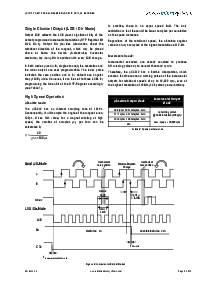
commutation - 模式 3.0
(一个-柱子-一双)
U
V
W
位置:
0 171 341 512 683 853 0
角度:
0,0 60,12 119,88 180,0 240,12 299,88 360,0
宽度: 512 步伐 宽度: 512 步伐
cw 方向
图示 9: u, v 和 w-信号 为 bldc 发动机 commutation (div1 = 0; div0 = 0)
commutation - 模式 3.2
(二-柱子-pairs)
U
V
W
位置:
0 85 171 256 341 427 512 597 683 768 853 939 0
角度:
0,0 29,88 60,12 90,0 119,88 150,12 180,0 209,88 240,12 270,00 299,88 330,12 360,0
宽度: 256 步伐 宽度: 256 步伐
cw 方向
图示 10: u, v 和 w-信号 为 2 柱子 bldc 发动机 commutation (div1=1; div0 = 0)