3952
全部-桥
pwm 发动机 驱动器
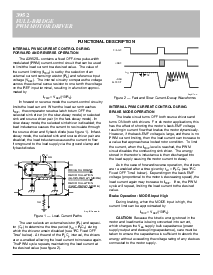
这个 也 改进 这 最大 比率 在 这个 这 加载
电流 能 增加 (作 对照的 至 快 decay) 预定的 至
这 慢 比率 的 decay 在 t
止
. 当 这 平均 加载
电流 是 减少, 快-decay 模式 是 使用 至 regulate
这 加载 电流 至 这 desired 水平的. 这个 阻止 tailing
的 这 电流 profile 造成 用 这 后面的-emf 电压 的
这 stepper 发动机.
在 stepper 发动机 产品 应用 一个 常量
电流 至 这 加载, 慢-decay 模式 pwm 是 使用
典型地 至 限制 这 切换 losses 在 这 设备 和 iron
losses 在 这 发动机.
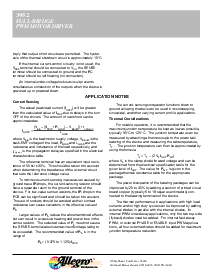
直流 发动机 产品
在 关闭-循环 系统, 这 速 的 一个 直流 发动机 能
是 控制 用 pwm 的 这 阶段 或者 使能 输入, 或者
用 varying 这 ref 输入 电压 (v
REF
). 在 数字的 系统
(微处理器 控制), pwm 的 这 阶段 或者
使能 输入 是 使用 典型地 因此 avoiding 这 需要 至
发生 一个 能变的 相似物 电压 涉及. 在 这个 情况,
一个 直流 电压 在 这 ref 输入 是 使用 典型地 至 限制 这
最大 加载 电流.
在 直流 伺服 产品 那 需要 精确 位置-
ing 在 低 或者 零 速, pwm 的 这 阶段 输入 是
选择 典型地. 这个 使简化 这 伺服-控制 循环
因为 这 转移 函数 在 这 职责 循环 在
这 阶段 输入 和 这 平均 电压 应用 至 这
pcb 布局
这 加载 供应 终端, v
BB
, 应当 是 decoupled
(>47
µ
f electrolytic 和 0.1
µ
f 陶瓷的 电容 是
推荐) 作 关闭 至 这 设备 作 是 physically
实际的. 至 降低 这 效应 的 系统 地面 i
•
R
drops 在 这 逻辑 和 涉及 输入 信号, 这 系统
地面 应当 有 一个 低-阻抗 返回 至 这 加载
供应 电压.
看 也
“
电流 感觉到
”
和
“
热的 考虑-
ations
”
在之上.
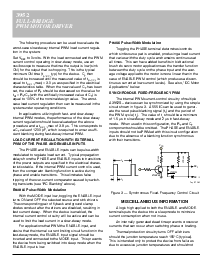
fixed 止-时间 选择
和 增加 值 的 t
止
, 切换 losses de-
crease, 低-水平的 加载-电流 规章制度 改进, emi 是
减少, 这 pwm 频率 将 decrease, 和 波纹
电流 将 增加. 这 值 的 t
止
能 是 选择 为
optimization 的 这些 参数. 为 产品 在哪里
audible 噪音 是 一个 concern, 典型 值 的 t
止
是 选择
至 是 在 这 范围 的 15 至 35
µ
s.
stepper 发动机 产品
这 模式 终端 能 是 使用 至 优化 这
效能 的 这 设备 在 microstepping/sinusoidal
stepper 发动机 驱动 产品. 当 这 平均 加载
电流 是 增加, 慢-decay 模式 是 使用 至 限制 这
切换 losses 在 这 设备 和 iron losses 在 这 发动机.
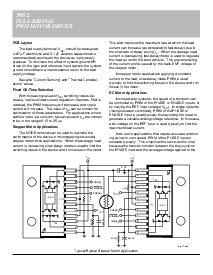
典型 双极 stepper 发动机 应用
25 k
Ω
+
820 pf
0.5
Ω
V
BB
1
2
3
4
5
6
78
910
11
12
V
CC
V
BB
逻辑
1
2
3
4
5
6
78
910
11
12
V
CC
V
BB
逻辑
dwg. ep-048
模式
2
使能
2
阶段
2
V
REF2
模式
1
使能
1
阶段
1
V
REF1
47
µ
F
+5 v
0.5
Ω
25 k
Ω
820 pf